ROS2に既に用意されたパッケージだけで、joystickを使って亀を動かせるとのことでやってみた。
インストールやパッケージから出力されるトピックは、きょうのかんぱぱのサイトやdemura.netに載っているので参照させていただく。
動作環境としてPCのubuntuを使った。

joystickとPCをペアリングする
PCとjoystickをペアリングするには、まずライトが点滅するまでjoystickのSHAREボタンとPSボタンを同時に押す。
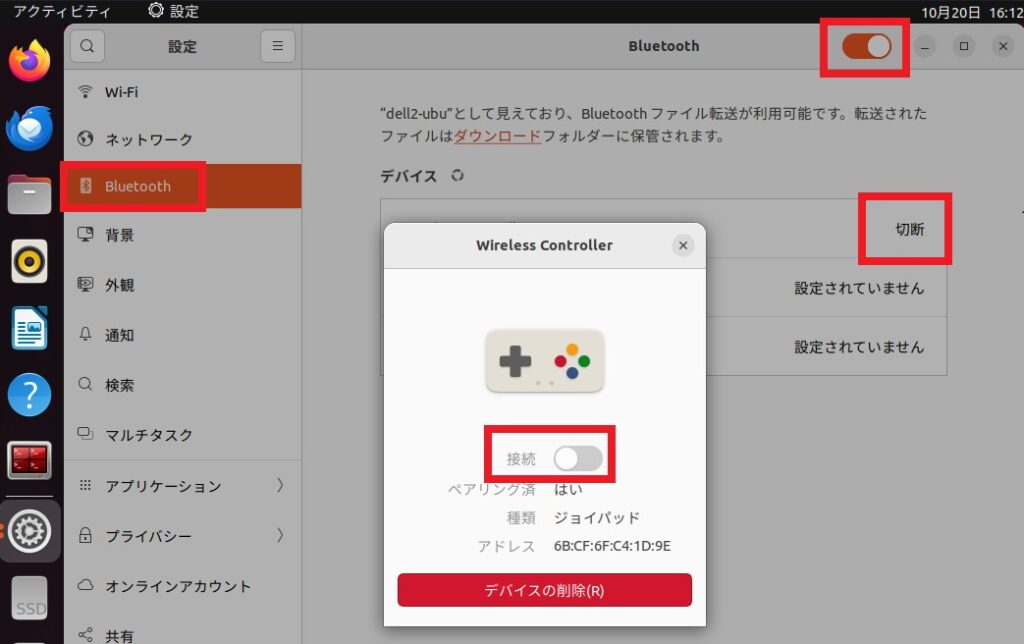
続いてPC画面の右上にある「電源アイコン」→「Bluetoothオン」→「Bluetoothの設定」の順に選択する。
上記の画面で赤枠の選択を行い、「接続」がグレーからオレンジに変われば接続されている。
切断する場合は、「接続」をオレンジからにグレーに変える。
ペアリングは、PCの画面から行う。つまりリモートログインした画面からはできなかった。
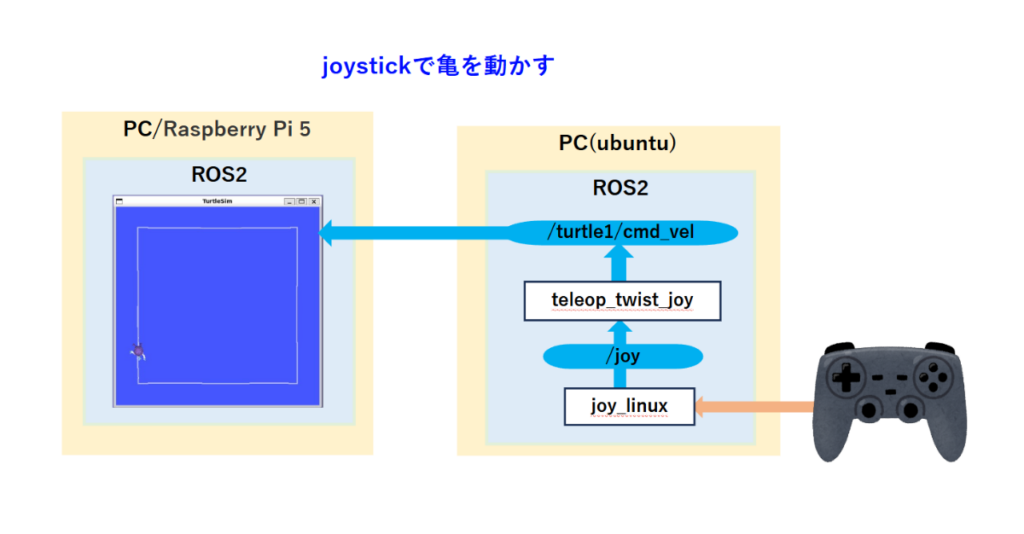
joystickで亀を動かしてみる
操作方法
すべてPC上で操作する。
[端末1] --- PC上でturtlesim を起動する。
ros2 run turtlesim turtlesim_node
[端末2] --- joystickの操作から/joyトピックをパブリッシュする。
ros2 run joy_linux joy_linux_node
[端末3] --- トピックjoy_velをturtlesimのtopicに変更してcmd_velをパブリッシュする。
ros2 launch teleop_twist_joy teleop-launch.py joy_vel:=/turtle1/cmd_vel