使い方
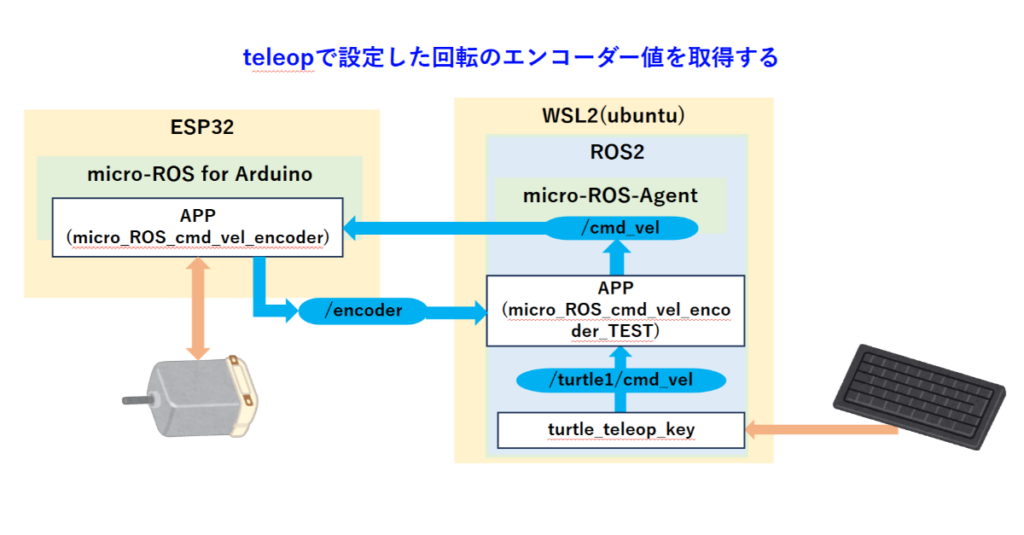
[端末1] --- Raspi5上でmicro-ROS-Agentを起動する。
sudo docker run -it --rm -v /dev:/dev --privileged --net=host microros/micro-ros-agent:jazzy udp4 --port 8888
[端末2] --- turtlesimのtoleopを起動する。/turtle1/cmd_velをパブリッシュする。
ros2 run turtlesim turtle_teleop_key
[端末2] --- WSL2上でpythonのアプリを起動する。
ros2 run dc_motor_encoder micro_ROS_cmd_vel_encoder_TEST