概要 東証の銘柄についてYAHOOファイナンスの個別情報の表示を簡単にするツールです。ブラウザからここにアクセスします。 使い方 表示されている銘柄のコード部分…
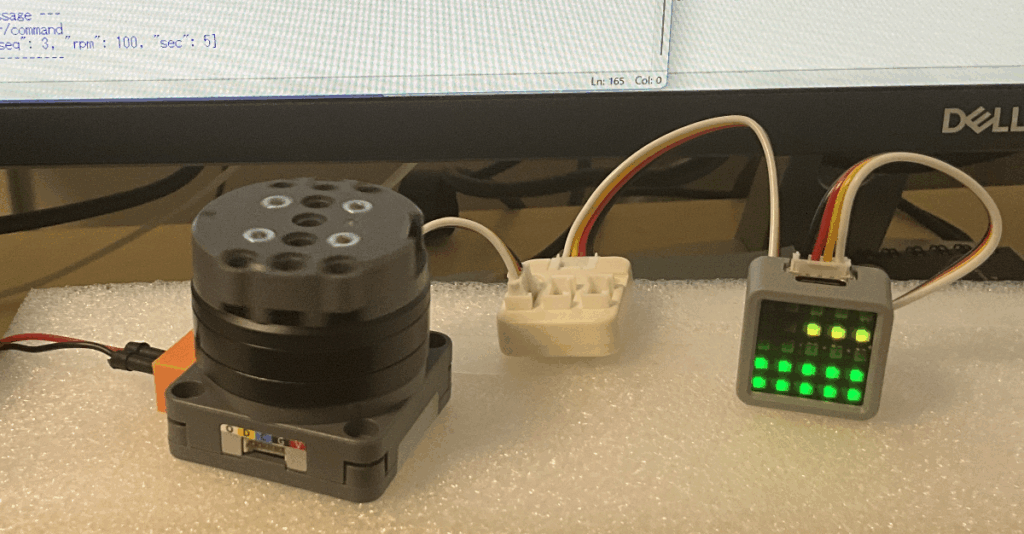
注意 MQTT_Matrix_pub_commans_speed.pyに変わっている 概要 統合型ブラシレス DC モーターモーションコントロールキット(R…