ROS
ROS
-
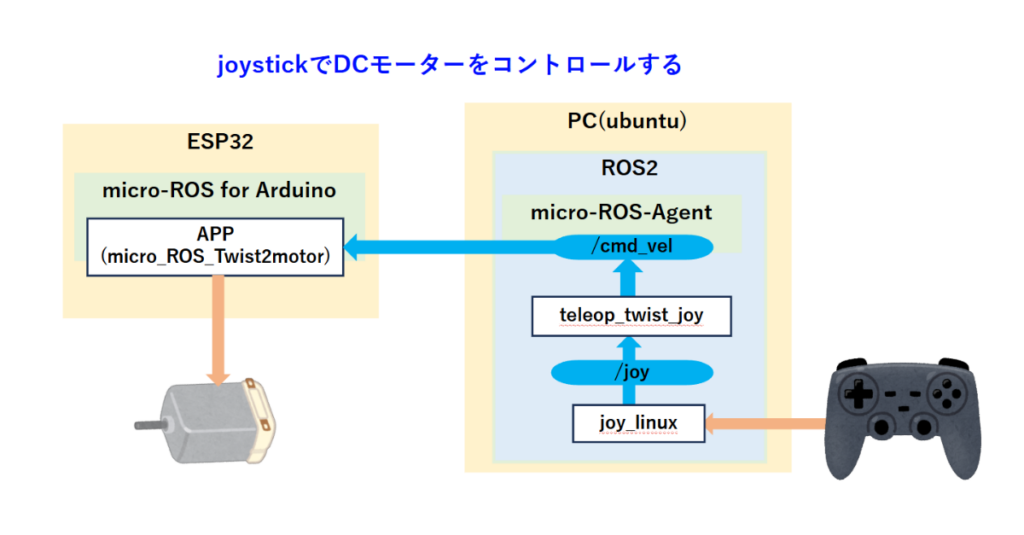
[ROS2]joystickでDCモーターをコントロールする
以前、joystickで亀を動かした。今回は亀の代わりにモーターをコントロールする。これは次の投稿を組み合わせたものになる。●[ROS2]ROS2にjoysti…
-

[ROS2]ROS2にjoystickを接続してみた
ROS2に既に用意されたパッケージだけで、joystickを使って亀を動かせるとのことでやってみた。インストールやパッケージから出力されるトピックは、きょうのか…
-

micro-ROSをやってみた
micro-ROSを使うとマイコン上にROS2のノードを作れるということなのでやってみた。ESP32のAPPでトピックを直接扱えるのはありがたい。micro-R…
-
[ROS2]亀をPythonで周回させてみた
-

[ROS2] ワークスペースおよびパッケージ作成
ワークスペースを新規に作成し、その中にパッケージを作り、Pythonで簡単なプログラムを作る。 ワークスペースを作る パッケージを作る ●パッケージを作成する …
-
[ROS2]亀(turtlesim)で遊んでみた
以下の記載は保留する。よくわかるサイトがあるのでそれを参照する。●ROS2ドキュメント:Jazzyのチュートリアル 初心者: CLI ツール●ロボット制御 #1…
-
WSL2にROS2(jazzy)をインストールしてみた
昨年、WSL2にROS2をインストールしてみたら外部のROS2と通信できずに使用を断念した。あれから時間が経ったのでもう一度検索してみたら「@akinami」さ…