ROS
ROS
-
オドメトリー実験車を調整する
オドメトリーの現在地ができるだけ実測値に近づくように調整する。 micro_ROS_joy2cmd_vel_measurement.py 前進距離を調整する R…
-
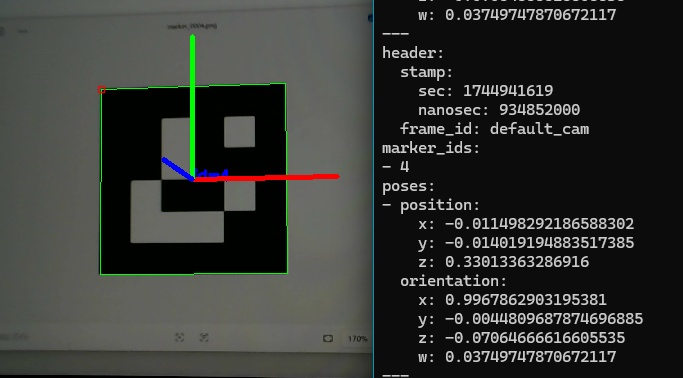
ArUcoマーカーを検出する
ArUcoマーカーの検出方法として以下の2通りを試してみた。 OpenCVのArUcoモジュールを使う。pythonのスクリプトでOpenCVのArUcoモジュ…
-

ATOMS3R M12カメラキットの画像をROS2にパブリッシュ
ROS2内でArUcoマーカーを使うために、ATOMS3R M12の画像をトピックとしてパブリッシュするスクリプトを作った。ATOMS3R M12とPCとの接続…
-
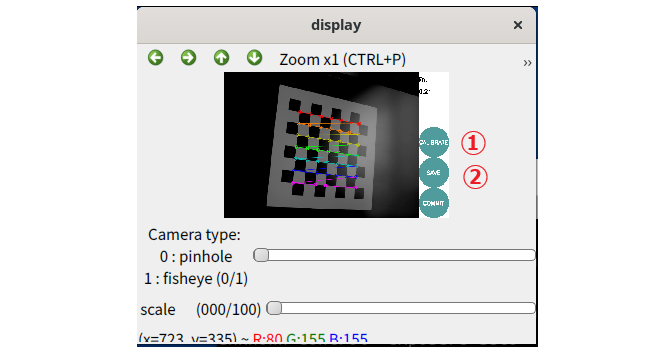
[ROS2]カメラキャリブレーションの方法
カメラキャリブレーションを行うことでレンズの歪みを補正できる。 環境 Raspberry Pi 5 Ubuntu Desktop 24.04.2 LTSROS2…
-

Raspberry Pi 5 用のSDカードを作る(jazzy)
概要 Raspberry Pi 5上でROS2のバージョンjazzyを動作させるSDカードを作る。主なインストールは以下の通り。1.Ubuntu Desktop…
-
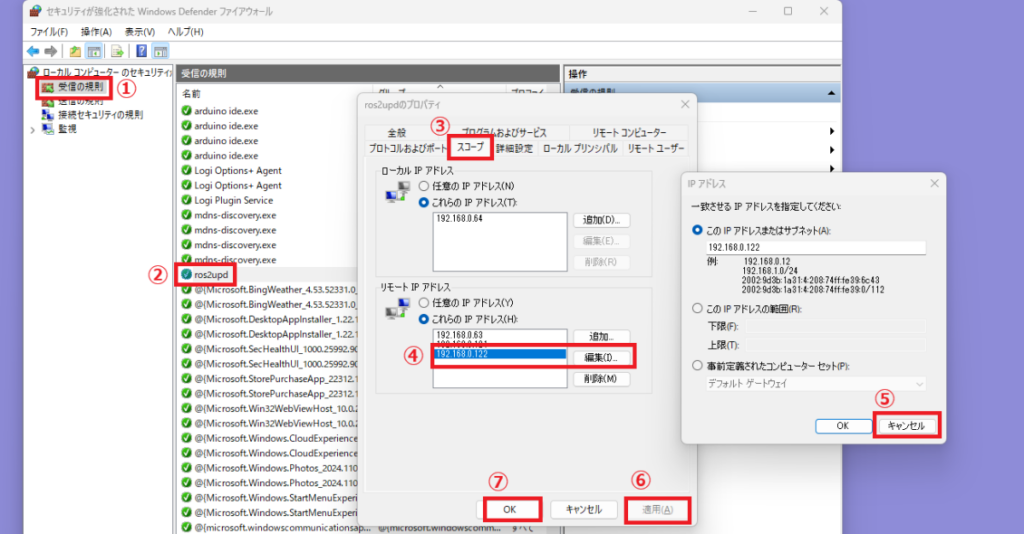
Defenderファイアウォールを再設定する
WSL2上のROS2は、PCを起動するたびにWindowsとWSL2との間のファイアウォール設定が無効になる。というか、有効のままにする設定を知らない。当面、毎…
-
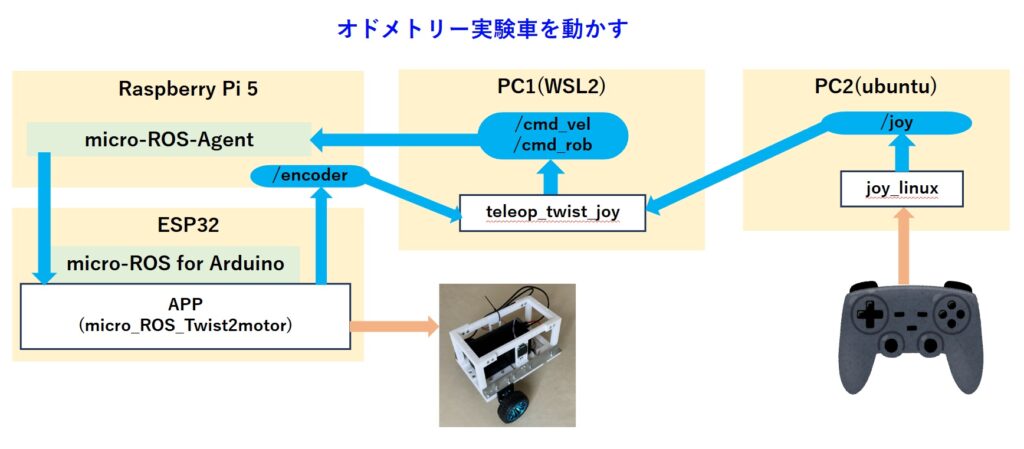
オドメトリー実験車を動かす
オドメトリー実験車の動かし方は次の3通りある。➀ ジョイスティックでコントールする 単純にジョイスティックをラジコンのコントローラーとして使う動かし方。➁ ロボ…
-
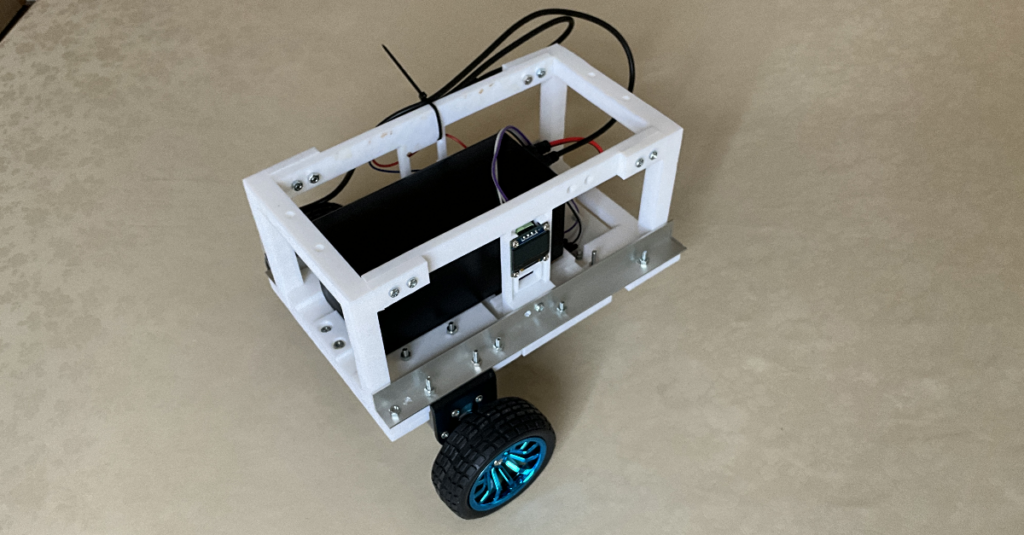
オドメトリー実験の本体
オドメトリーの実験に使った車体の外観、サイズ及び部品
-
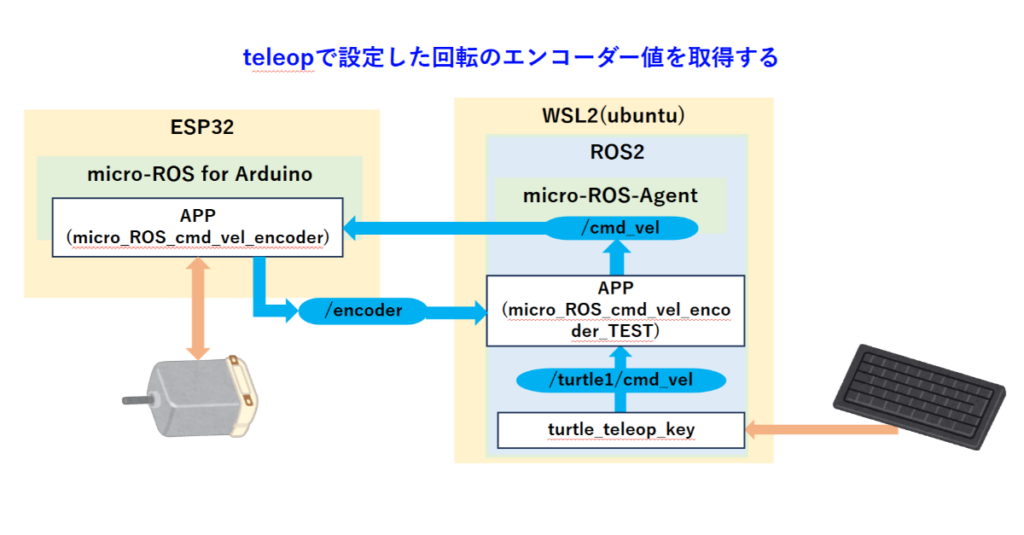
エンコーダーを使ったオドメトリーをやってみた
使い方
-
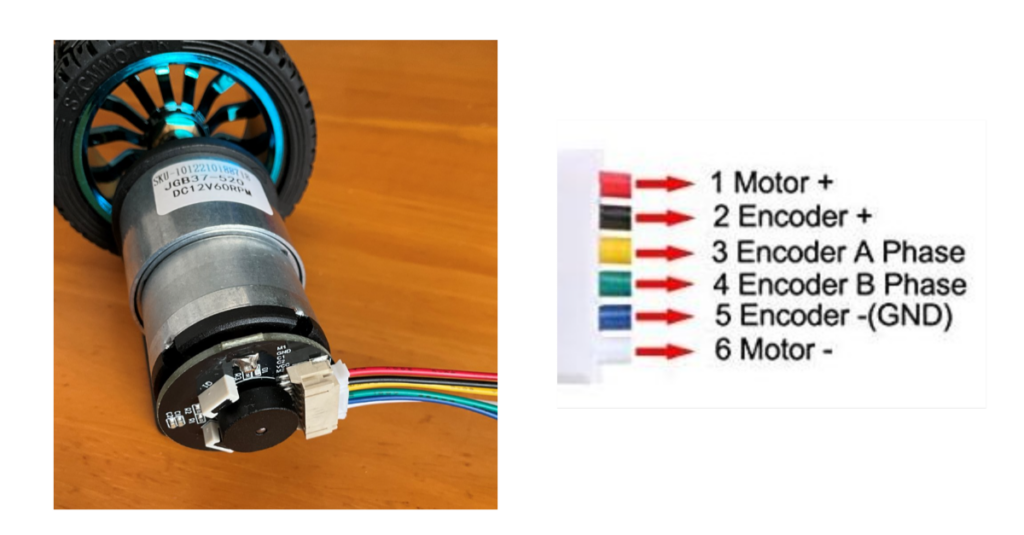
DCモーターのエンコーダーを使ってみる
今回使用するモーターから6本のコードが出ている。このうち1と6がモーター駆動用。2と5がエンコーダーの電源用、3と4からエンコーダのパルスが出力される。ところが…