機能 LiDAR側の線 (一般的な色) Atom Matrix ピン 備考 Logic 5V 赤 (4pin側) 5V 回路電源 Logic GND 黒 (4p…
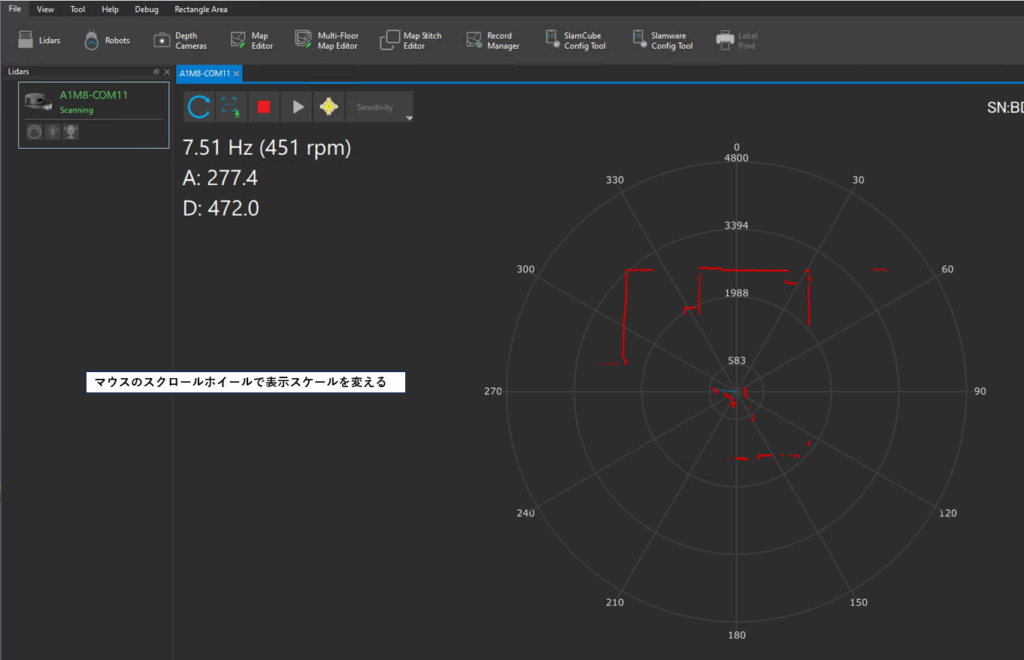
概要 RPLidar A1 M8のオフィシャルサイトからWindowsのツールをダウンロードし、試してみた。 ダウンロード ここからダウンロードした。検索では分…