ROS
-
どこでもナビケーション
概要 My_Naviでナビケーションを行うにはWi-Fi環境が必要である。家の外でも実行できるように専用のルーターを用意した。これでどこでもナビゲーションを実行…
-
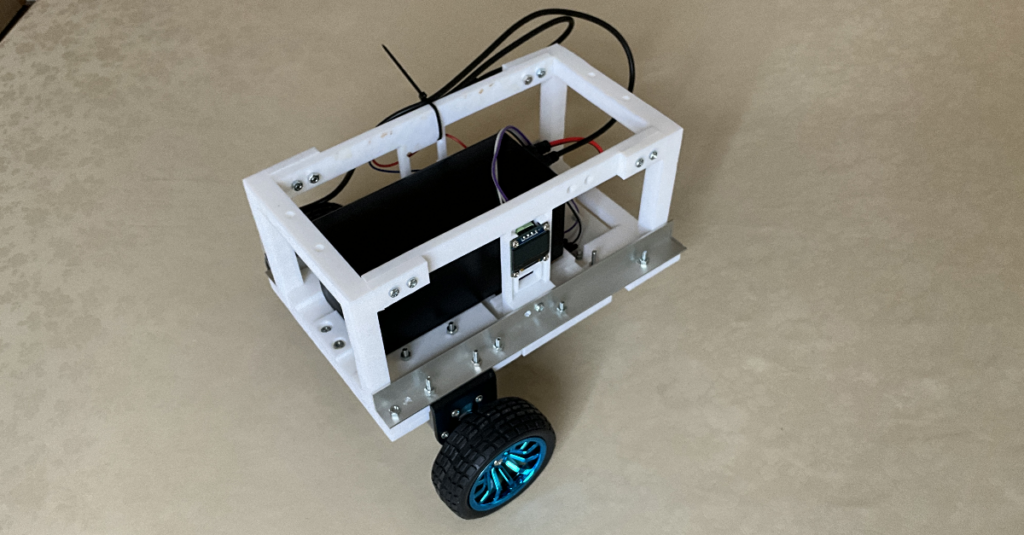
自作ロボットカーをナビケーションする
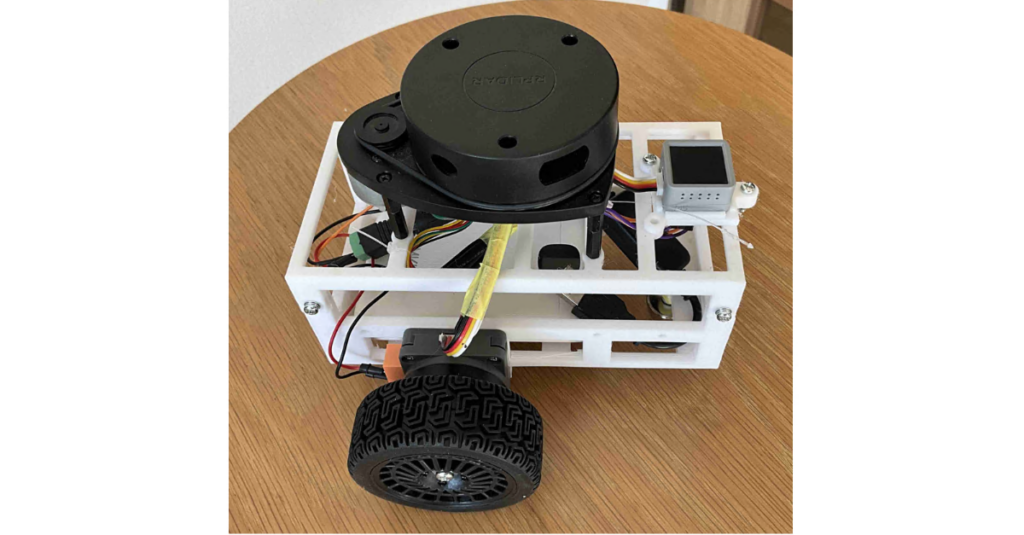
外観 ロボットカーの構成部品 システム構成仕様書 ハードウェア仕様 (URDF定義) 項目 値 備考 駆動方式 差動二輪駆動 (Differential Dri…
-
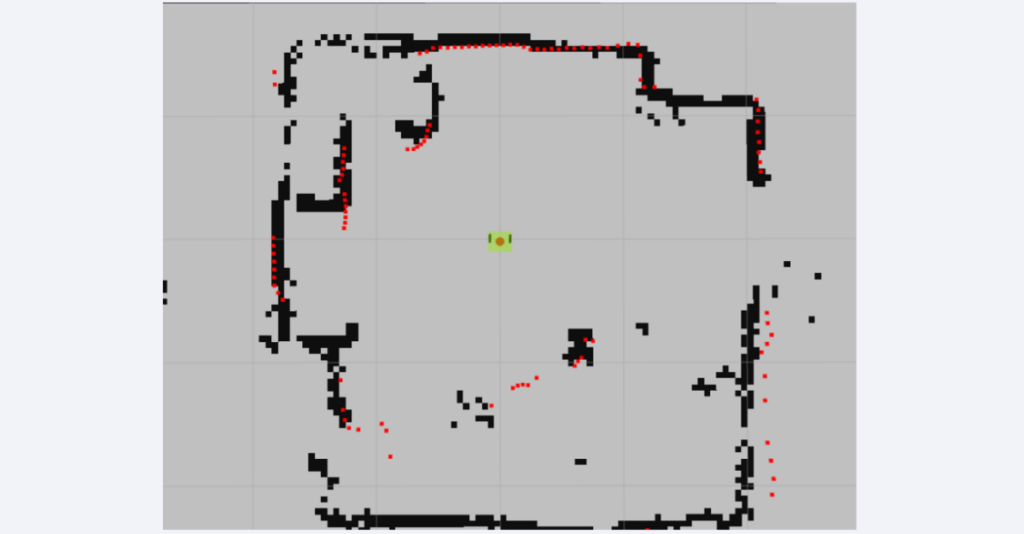
自作ロボットカーで地図を作る
使い方 地図を作るときのロボットの動かし方 mapper_params_online_async.yamlの変更一覧 項目名 所属ノード オリジナルのデフォルト…
-
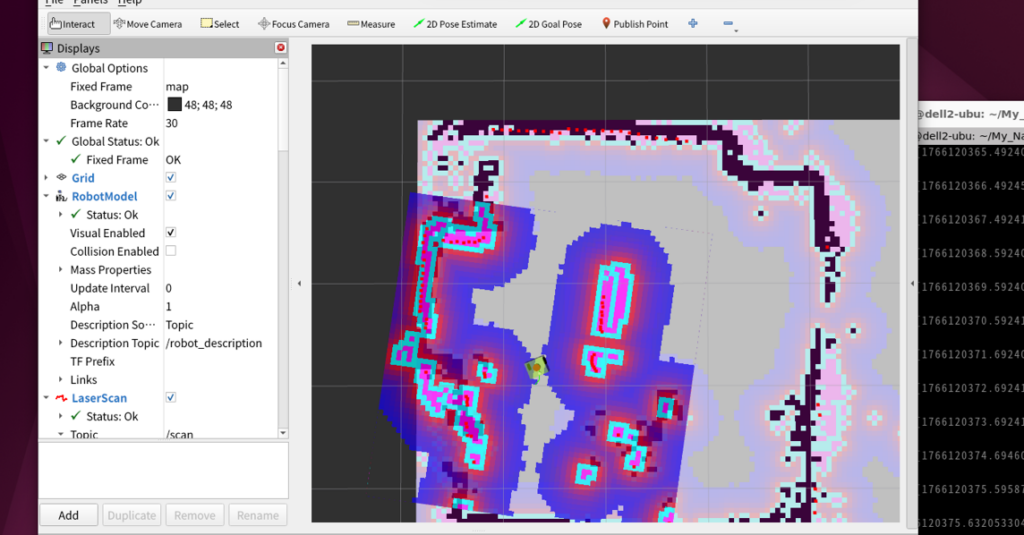
自作ロボットカーを自動走行する
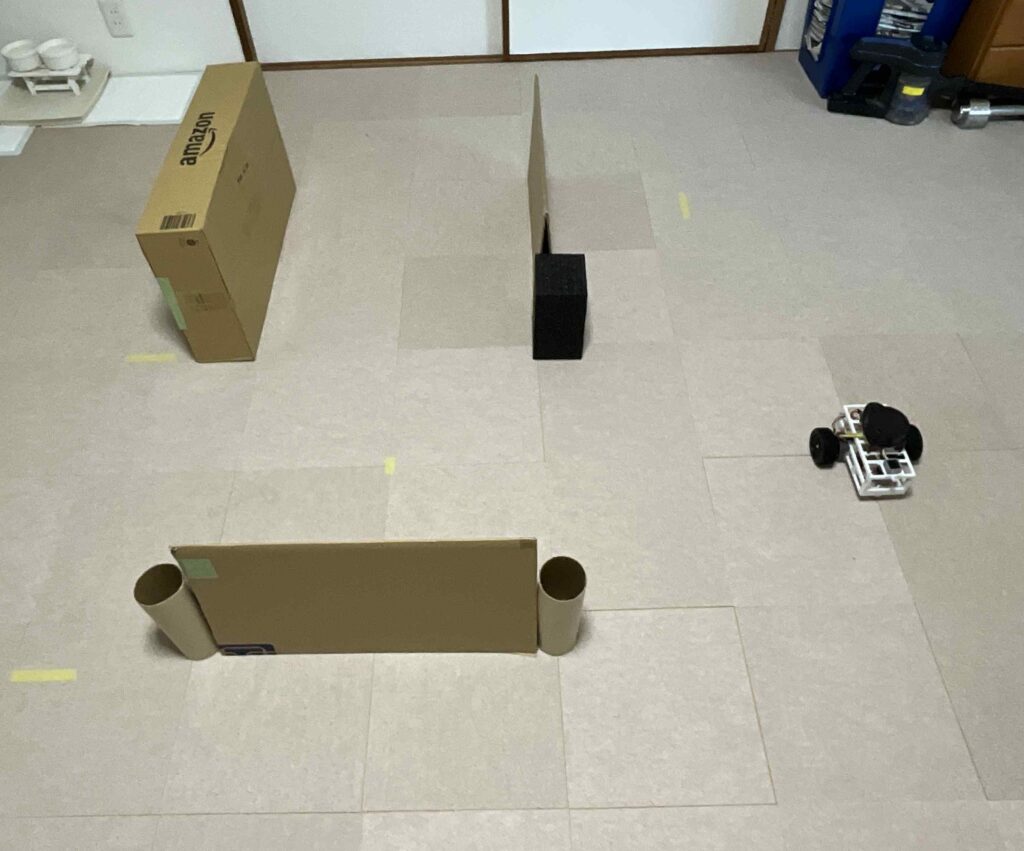
迂回路探索 迂回路探索を試す場合は上の写真のように障害物を配置する。その際のマップはmy_map3を使ってローンチは以下のコマンドを使う。ros2 launch…
-
Atom MatrixにRPLidar A1 M8をつなぐ
機能 LiDAR側の線 (一般的な色) Atom Matrix ピン 備考 Logic 5V 赤 (4pin側) 5V 回路電源 Logic GND 黒 (4p…
-
Roller485 Liteでロボットカー本体を作る
この情報は途中経過で最終版ではない 概要 Roller485 Liteで差動2輪ロボットカー本体を作ってみた。Roller485 Liteを使うメリットは以下の…
-
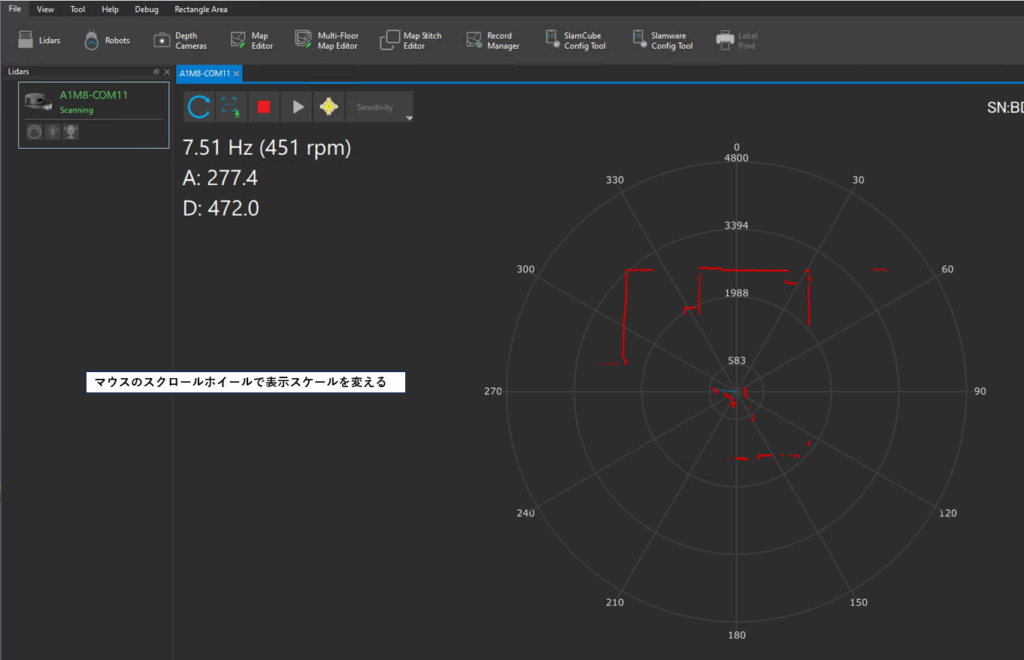
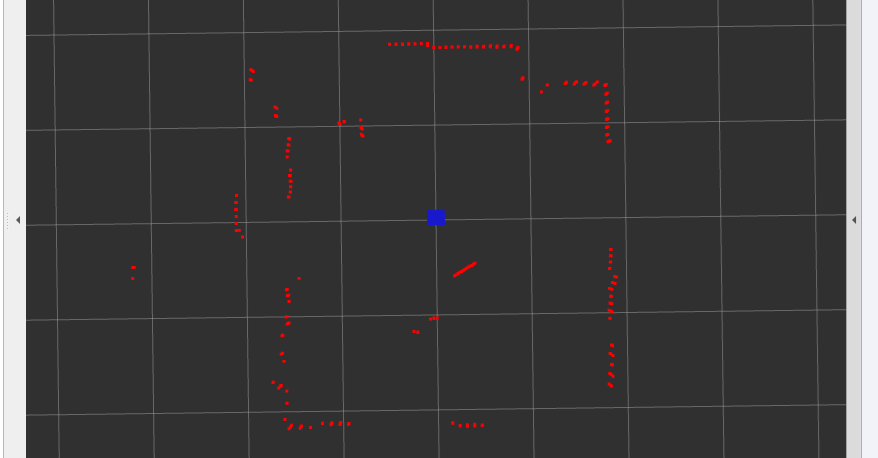
RPLidar A1 M8をWindowsで試す
概要 RPLidar A1 M8のオフィシャルサイトからWindowsのツールをダウンロードし、試してみた。 ダウンロード ここからダウンロードした。検索では分…
-
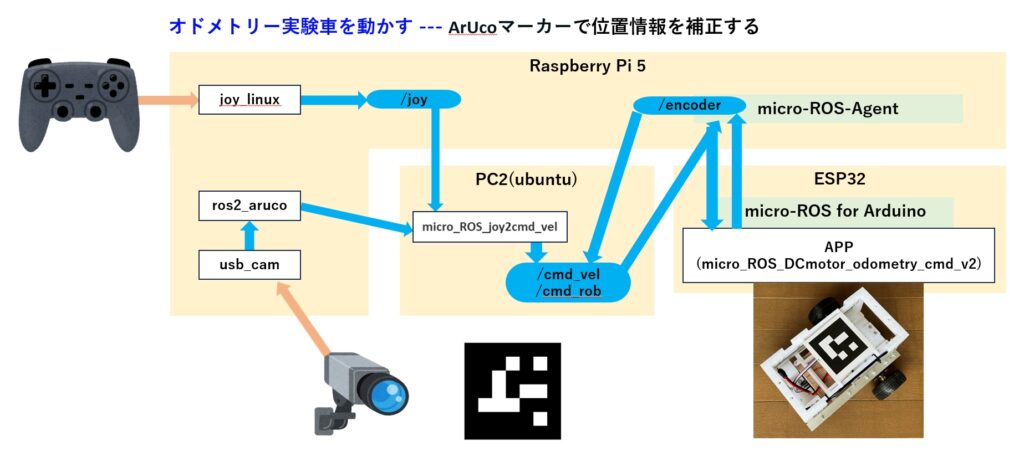
オドメトリー実験用コントローラープログラム
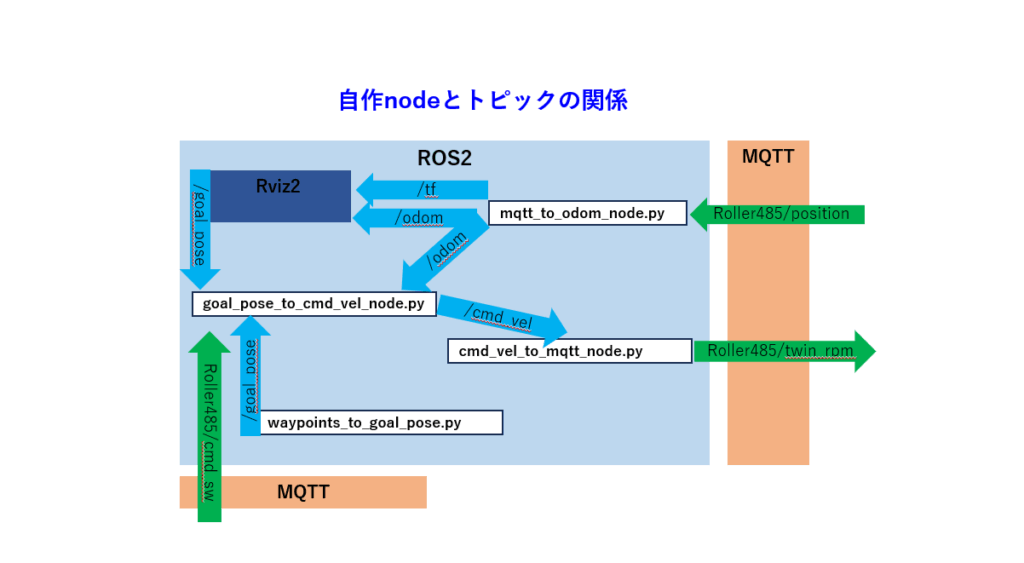
上の画像の「micro_ROS_joy2cmd_vel.py」を作る。 トピック トピック名 メッセージ型 通信方向 使用ノード 説明 /joy Joy Sub…
-
オドメトリー実験車のプログラム
WSL2で起動するジョイスティックコントロール(python) odometryをパブリッシュするコード(python) ロボット搭載ESP32のコード(Ard…
-
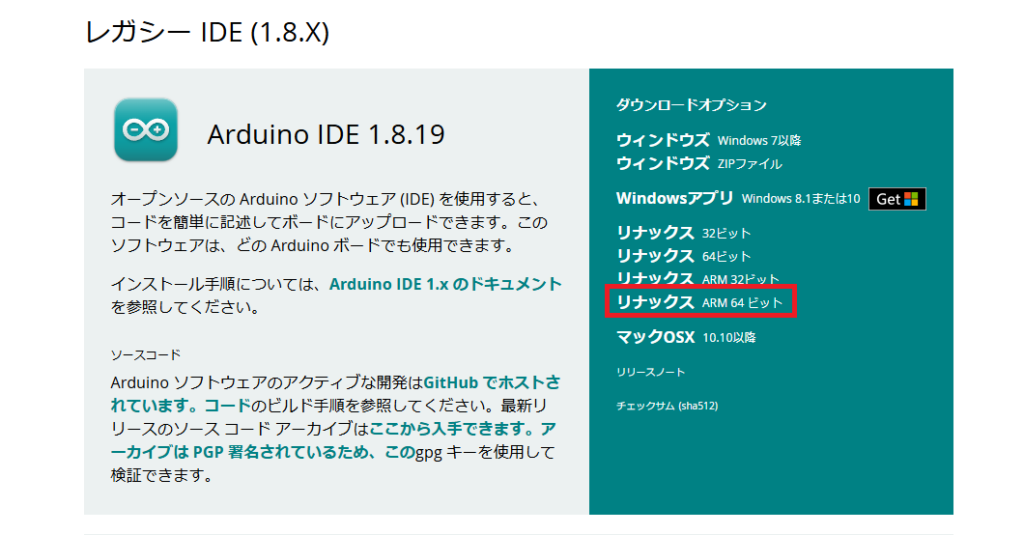
Raspberry Pi 5 に Arduino IDE をインストールする
Raspberry Pi 5 に Arduino IDE をインストールした。但し、バージョンは2.xではなく Arduino IDE 1.8.19 である。 …