電子工作
-
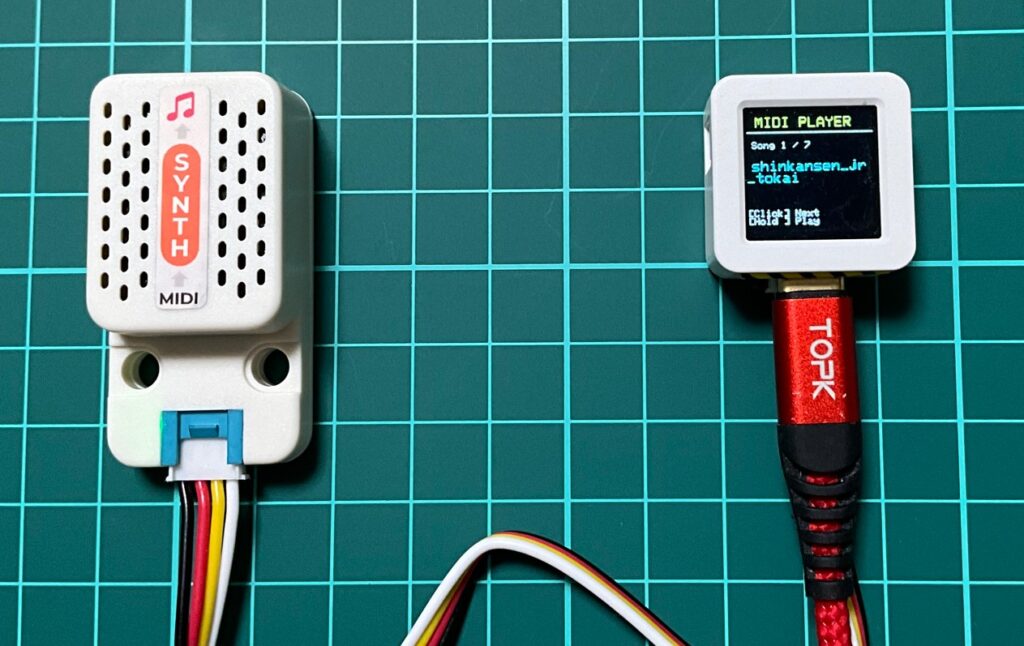
M5Stack用MIDIシンセサイザユニットを使ってみた
使い方 ネットから無償のmidiファイルをダウンロードし、このユニット用に変換しArduino IDEで書き込む。 1. midiファイルをこのユニット用に変換…
-
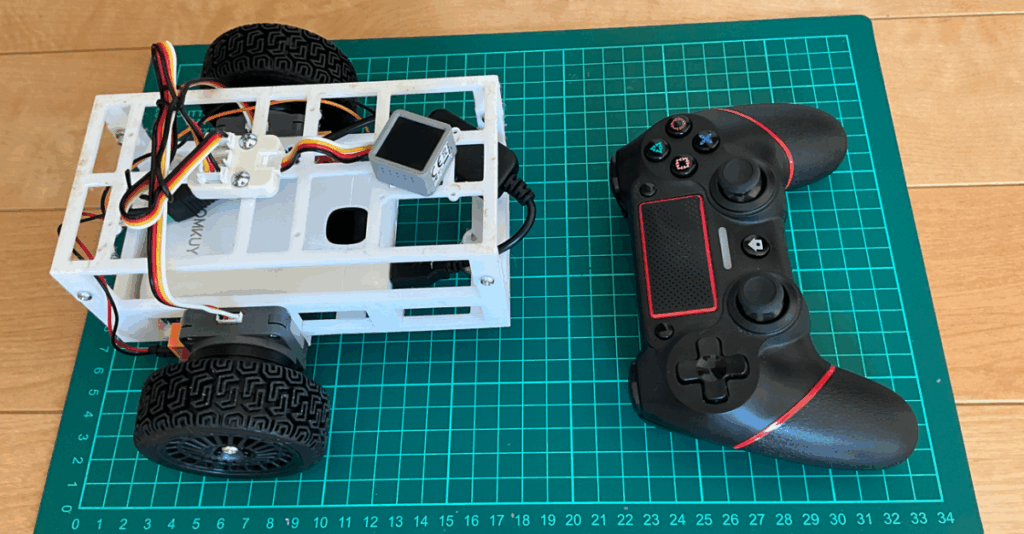
2個のRoller485 Liteを回す(2)
概要 前回に続き、Roller485 Liteを2個使いロボットカーのベースを作る。joystickコントローラでロボットカーの前後、回転の操作ができる。 使い…
-
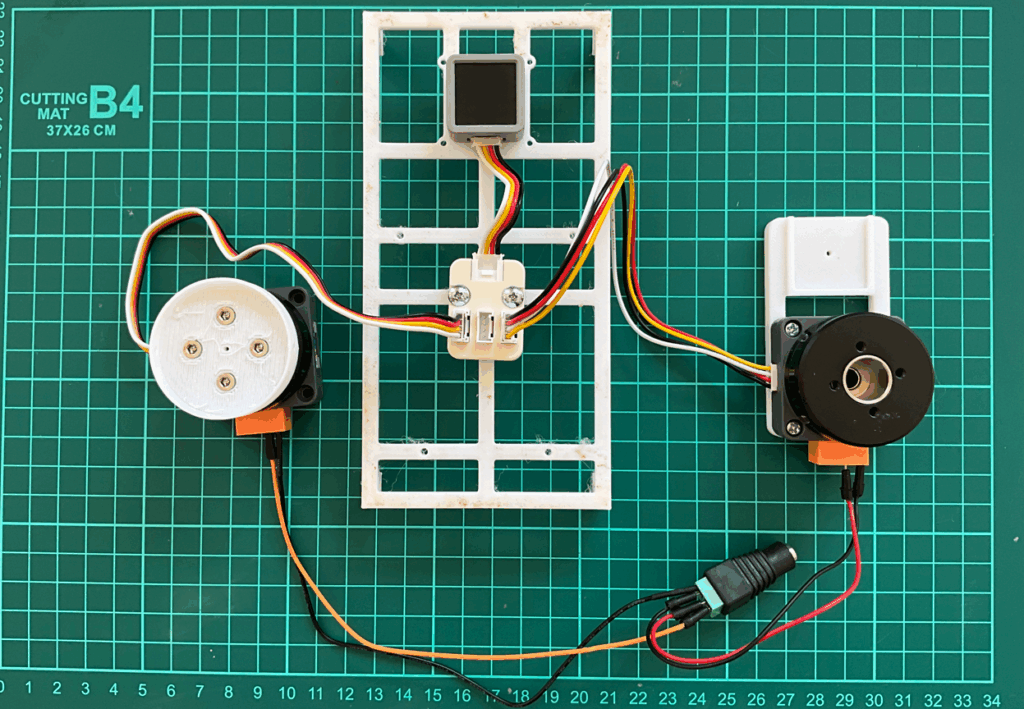
2個のRoller485 Liteを回す(1)
概要 2個のRoller485 Liteを回す最も基本の例。MQTTでコマンドをAtom Matrixに送りコントロールする。トピック “Rolle…
-

2.8インチTFTディスプレイに画像を表示する
概要 PCのPythonスクリプトは、PCの画像をMQTTを使ってESP32に送くります。ESP32は受け取った画像を2.8インチTFTディスプレイに表示します…
-

ATOM Matrixを使う
参照サイト 使い方を詳しく解説してある(ロジカラブログ)オフィシャルサイト 使うときの注意1 COMポートからアップロードした後は、USBケーブルを一度抜いて再…
-
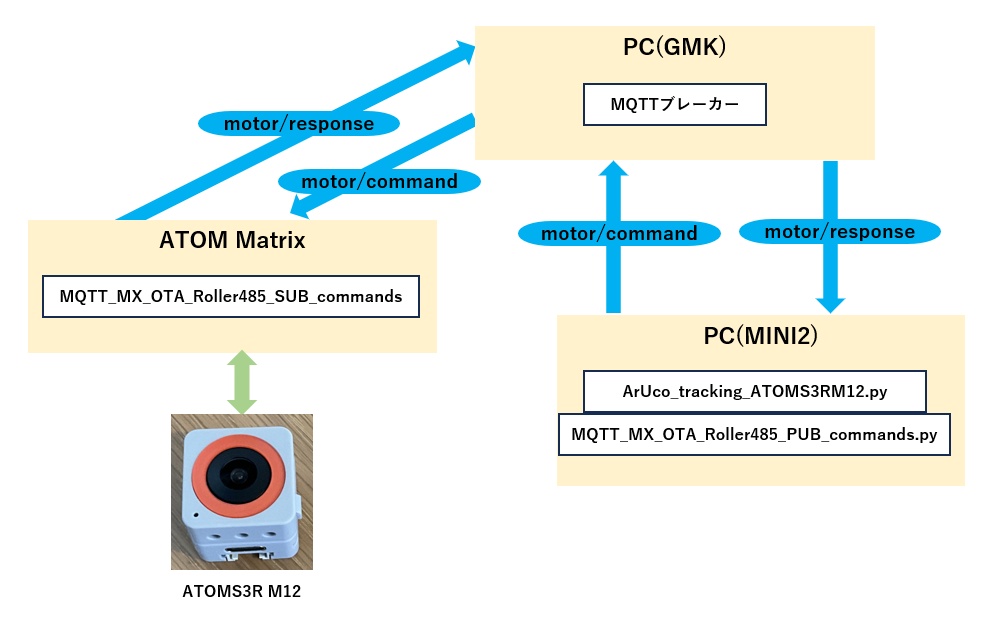
Roller485 LiteとATOMS3R M12カメラキットでArUcoマーカーをトラッキングする
概要 Roller485 LiteのPOSITIONモードは、指定した角度に俊敏に移動する。カメラでマーカーをトラッキングしたらその俊敏さが分かると思いやってみ…
-
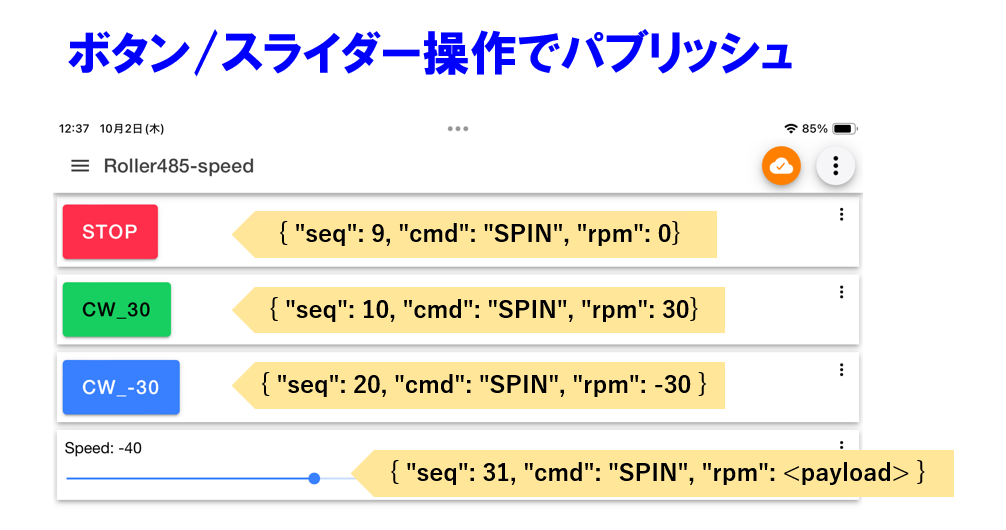
IoT MQTT Panelを使ってみる
概要 iPadやスマホで使えるMQTTアプリIoT MQTT Panelを試してみた。下の画像が使用例。STOPボタンを押すと右の黄色の帯にあるメッセージがパブ…
-
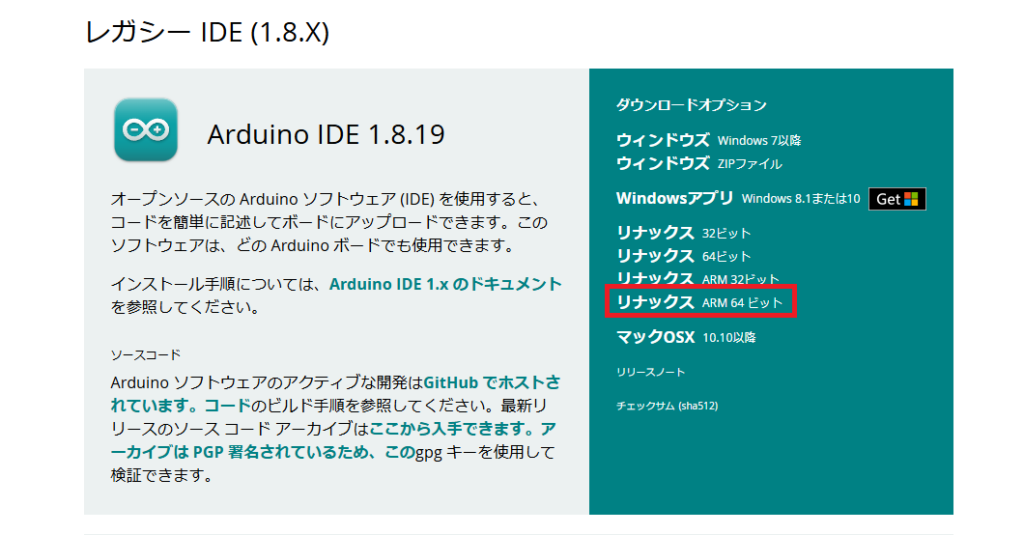
Raspberry Pi 5 に Arduino IDE をインストールする
Raspberry Pi 5 に Arduino IDE をインストールした。但し、バージョンは2.xではなく Arduino IDE 1.8.19 である。 …
-

ATOMS3R M12カメラキットの画像をROS2にパブリッシュ
ROS2内でArUcoマーカーを使うために、ATOMS3R M12の画像をトピックとしてパブリッシュするスクリプトを作った。ATOMS3R M12とPCとの接続…
-
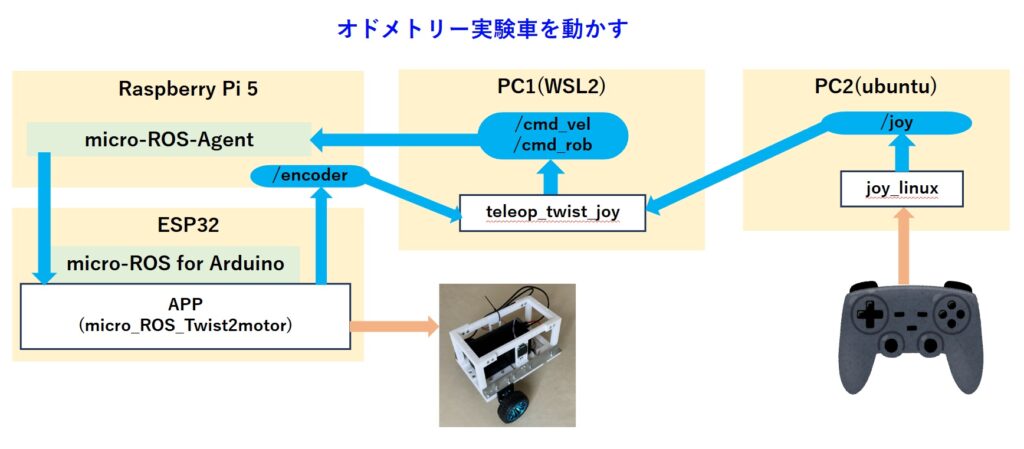
オドメトリー実験車を動かす
オドメトリー実験車の動かし方は次の3通りある。➀ ジョイスティックでコントールする 単純にジョイスティックをラジコンのコントローラーとして使う動かし方。➁ ロボ…