注意 MQTT_Matrix_pub_commans_speed.pyに変わっている
概要
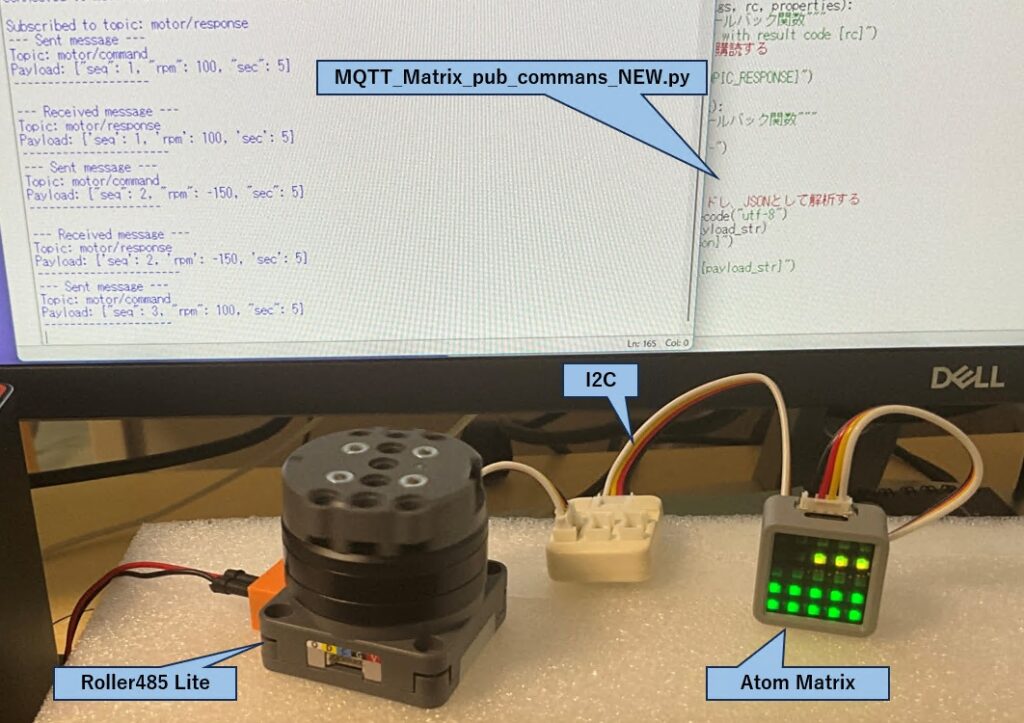
統合型ブラシレス DC モーターモーションコントロールキット(Roller485 Lite)というモーターなのにディスプレイが付いている。
興味をひかれたので使ってみる。
コントローラにはATOM Matrixを使う。
環境
- モーター Roller485 Lite
- コントローラ ATOM Matrix
↑これをつかうこと - MQTTブローカー
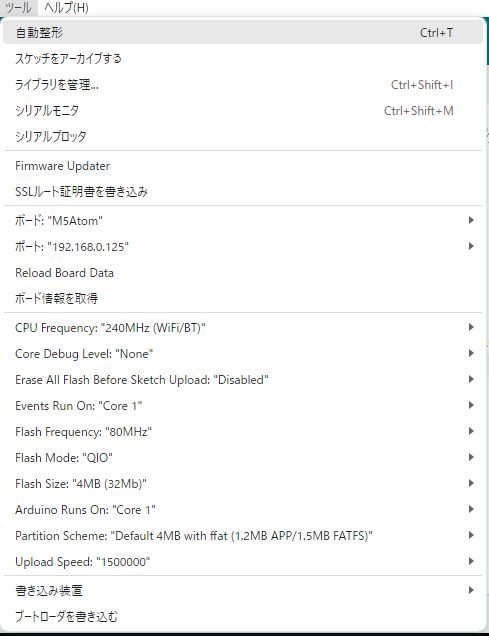
- Arduino IDE バージョン: 2.3.4
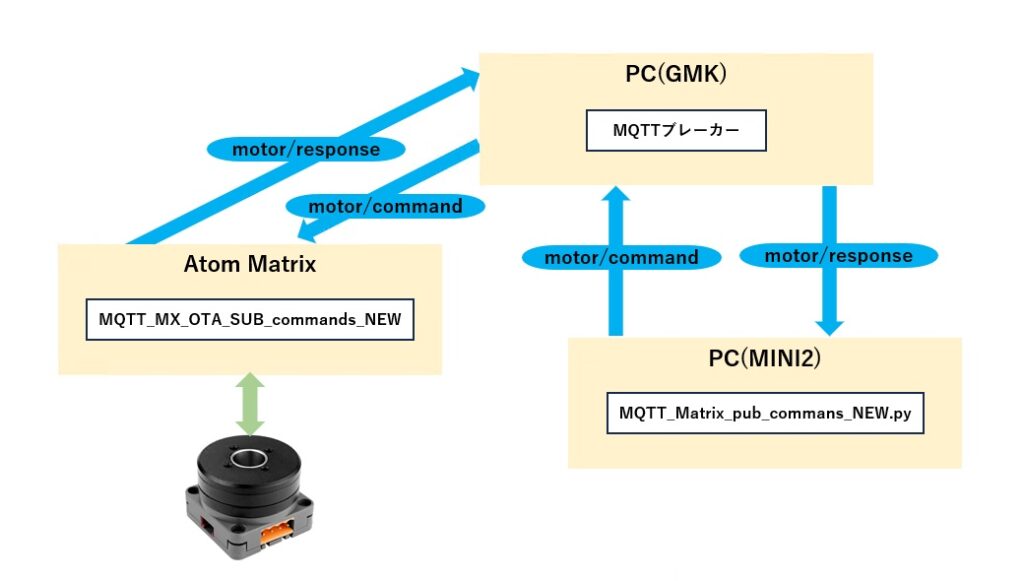
構成図
*** 旧 ***
MQTTブローカー : メッセージを仲介する。PCの起動でサービスも起動する。
MQTT_MX_OTA_PUB_commands_NEW : リストcommansの内容で順次、モーターの動作指示をパブリッシュする。
MQTT_MX_OTA_Roller485_SUB_commands : コマンドメッセージをサブスクライブし、モーターを制御する。
MQTTブローカー : メッセージを仲介する。PCの起動でサービスも起動する。
MQTT_Matrix_pub_commans_speed.py: リストcommansの内容で順次、モーターの動作指示をパブリッシュする。
MQTT_MX_OTA_Roller485_SUB_commands : コマンドメッセージをサブスクライブし、モーターを制御する。
使い方
Pythonからコマンドを送る
MQTT_Matrix_pub_commans_NEW.pyをIDLEで開き、実行する。
MQTTを使ってモーターに送るコマンド(変数commans )を調整する。
commans = (("SPIN", 100, 5), ("POS", 30, 5), ("SPIN", 0, 5))
"SPIN": モーターの回転指示
100: モーターの回転数(RTM)
5: 次のコマンドを送るまでの時間(sec)。通常はこの時間指定した回転数を維持する
"POS" 現在の回転位置をレスポンスで取得するコマンドプロンプトからコマンドを送る
(1) PC(GMK)にリモートログイン
(2) cd C:\Program Files\mosquitto
トピックをパブリッシュする。
(3) mosquitto_pub -h localhost -t motor/command -m {\"seq\":1,\"cmd\":\"SPIN\",\"rpm\":100,\"sec\":5}
100RPMでモーターを回す。5秒後にメッセージがエコーバックされる。
(4) mosquitto_pub -h localhost -t motor/command -m {\"seq\":1,\"cmd\":\"POS\",\"rpm\":0,\"sec\":5}
モーターのエンコーダー値をレスポンスで取得する。
トピックをサブスクライブする。
(5) mosquitto_sub -h localhost -t motor/response MQTT_MX_OTA_SUB_commands_NEW
// プログラム名: MQTT_MX_OTA_SUB_commands_NEW:2025-09-17
// 機能概略:
// – MQTT通信を利用して、Atom Matrixに接続されたモーターを遠隔制御します。
// – 受信トピック: “motor/command”
// – cmdが”SPIN”の場合:
// – “rpm”と”sec”の値に応じてモーターを回転させ、指定された時間、速度を維持します。
// – 速度は滑らかに目標値に遷移します。
// – “sec”経過後、受信メッセージを”motor/response”にエコーバックします。
// – “sec”経過後もモーターは指定された速度で回転し続けます。
// – cmdが”POS”の場合:
// – モーターの動きは変えず、現在の位置情報を取得します。
// – {“seq”: 受信値, “POSITION”: 現在位置}というメッセージを直ちに”motor/response”に送信します。
// – 送信後もモーターの状態は維持され、次のコマンドを待ちます。
// – cmdがない、または”SPIN”, “POS”以外の値の場合:
// – “motor/response”に{“command”: “cmd ERROR”}を送信します。
// – モーターの動きは現在の状態を維持し、次のコマンドを待ちます。
// – Wi-Fi、固定IP、OTAアップデートに対応しています。
#include <unit_rolleri2c.hpp> // M5Stack Unit RollerモジュールをI2C経由で制御するためのライブラリ
#include <WiFi.h> // Wi-Fi接続機能を提供
#include <ArduinoOTA.h> // OTA(Over-the-Air)ファームウェアアップデート用ライブラリ
#include “M5Atom.h” // M5Atom Matrixを制御するためのライブラリ
#include <PubSubClient.h> // MQTTクライアント機能を提供
#include <ArduinoJson.h> // JSONデータの解析用ライブラリ
// ====== ユーザー設定変数 ======
// #includeの直後に目立つように記述する
// MQTTブローカー設定
const char* mqtt_broker = “192.168.0.13”;
const int mqtt_port = 1883;
// MQTTトピック設定
const char* mqtt_topic_sub = “motor/command”;
const char* mqtt_topic_pub = “motor/response”;
// Wi-Fiネットワークの認証情報を設定
const char *ssid = “aterm-2b4139-a”;
const char *password = “3e00cfa4ba409”;
// デバイスに割り当てる固定IPアドレス
const IPAddress ip(192, 168, 0, 125);
const IPAddress gateway(192, 168, 0, 1);
const IPAddress subnet(255, 255, 255, 0);
const IPAddress dns1(192, 168, 0, 1);
// OTAアップデート時のネットワーク上のデバイス名
const char* host_name = “M5Stack-AtomMatrix”;
// メインループの遅延時間 (ms)。この値を調整して、モーターの回転の滑らかさを変更します。
int delay_ms = 8;
// ====== オブジェクトインスタンスの作成 ======
UnitRollerI2C roller;
WiFiClient wifiClient;
PubSubClient mqttClient(wifiClient);
StaticJsonDocument<256> doc;
// ====== モーター制御と状態管理 ======
int32_t currentTargetSpeed = 0; // 現在の設定速度 (RPM)
int32_t received_rpm = 0; // 受信したrpmの値
int received_sec = 0; // 受信したsecの値
bool isCommandReceived = false; // 新しいコマンドが受信されたかどうかのフラグ
unsigned long commandReceivedTime = 0; // コマンドを受信した時刻
// **追加: プログラム起動時のエンコーダ初期位置**
int32_t initialPosition = 0;
// プログラムの状態を管理するenum
enum ProgramState {
STATE_WAITING_FOR_COMMAND, // コマンド待機状態
STATE_TRANSITIONING_TO_NEXT_SPEED, // 次の速度へ滑らかに移行中
STATE_RUNNING_AT_TARGET_SPEED, // 目標速度で回転中
};
ProgramState currentState = STATE_WAITING_FOR_COMMAND; // 初期状態はコマンド待機
// ====== LED設定 ======
// LEDマトリックスの色を定義
#define LED_COLOR_WIFI_CONNECTING 0x0000FF // 青色 (Wi-Fi接続中)
#define LED_COLOR_WIFI_CONNECTED 0x00FF00 // 緑色 (Wi-Fi接続成功)
#define LED_COLOR_MQTT_CONNECTING 0xFFFF00 // 黄色 (MQTT接続中)
#define LED_COLOR_ERROR 0xFF0000 // 赤色 (エラー)
#define LED_COLOR_IDLE 0x000000 // 消灯 (待機状態)
// rpm値とsec値に基づいたLED表示を更新する関数
void updateLeds(int rpm, int sec) {
M5.dis.fillpix(LED_COLOR_IDLE); // 全LEDを一旦消灯
// RPM値に応じたLED表示
int rpm_leds_to_light = constrain(abs(rpm) / 10, 0, 15);
uint32_t rpm_color = (rpm >= 0) ? 0x00FF00 : 0x0000FF; // 正なら緑、負なら青
for (int i = 0; i < rpm_leds_to_light; i++) {
M5.dis.drawpix(i, rpm_color); // 1行目左から3行目右へ順に点灯
}
// SEC値に応じたLED表示
int sec_leds_to_light = constrain(sec, 0, 10);
uint32_t sec_color = 0xFFFF00; // 黄色
for (int i = 0; i < sec_leds_to_light; i++) {
M5.dis.drawpix(15 + i, sec_color); // 4行目左から5行目右へ順に点灯
}
}
// I2Cバス上でRollerモジュールを見つけて初期化する関数
void initRoller() {
// Atom MatrixのI2Cピンは固定 (SDA:26, SCL:32)
const auto sda = 26;
const auto scl = 32;
for (auto addr = 1; addr < 127; ++addr) {
if (roller.begin(&Wire, addr, sda, scl)) {
// モジュールが見つかったら初期設定を実行
roller.setRGBMode(roller_rgb_t::ROLLER_RGB_MODE_USER_DEFINED);
roller.setRGB(0);
roller.resetStalledProtect();
roller.setOutput(0);
roller.setMode(ROLLER_MODE_SPEED);
return;
}
}
for (int i = 0; i < 25; i++) {
M5.dis.drawpix(i, LED_COLOR_ERROR);
}
while(true) { delay(1000); }
}
// Wi-Fi接続中のピクセル点滅アニメーション
void connectAnimation() {
int count = 0;
while (WiFi.waitForConnectResult() != WL_CONNECTED) {
M5.dis.drawpix(count % 25, LED_COLOR_WIFI_CONNECTING);
delay(500);
M5.dis.drawpix(count % 25, LED_COLOR_IDLE);
count++;
}
}
// 指定された目標速度へ滑らかに変化させる関数
// @param targetSpeed: 目標速度 (RPM)
// @return:
// true: 遷移が完了した
// false: 遷移が継続中
bool updateSpeedTransition(int32_t targetSpeed) {
const int step_size = 2; // 加速・減速の変化量
if (currentTargetSpeed < targetSpeed) {
currentTargetSpeed += step_size;
if (currentTargetSpeed > targetSpeed) {
currentTargetSpeed = targetSpeed;
}
} else if (currentTargetSpeed > targetSpeed) {
currentTargetSpeed -= step_size;
if (currentTargetSpeed < targetSpeed) {
currentTargetSpeed = targetSpeed;
}
} else {
return true; // 遷移完了
}
roller.setSpeed(currentTargetSpeed * 100);
return false; // 遷移継続中
}
// MQTTメッセージを受信したときに呼び出される関数
void onMqttMessage(char* topic, byte* payload, unsigned int length) {
String receivedPayload = “”;
for (unsigned int i = 0; i < length; i++) {
receivedPayload += (char)payload[i];
}
// JSONペイロードの解析
DeserializationError error = deserializeJson(doc, receivedPayload);
// JSON解析が成功し、かつ”cmd”キーが存在する場合
if (!error && doc.containsKey(“cmd”)) {
String cmd = doc[“cmd”].as<String>();
// — cmdが”SPIN”の場合 —
if (cmd == “SPIN”) {
// 受信ペイロードからrpmとsecを取得
// rpmとsecが欠けていても0として処理を続行
received_rpm = doc.containsKey(“rpm”) ? doc[“rpm”].as<int32_t>() : 0;
received_sec = doc.containsKey(“sec”) ? doc[“sec”].as<int>() : 0;
// モーターを有効化し、状態を速度遷移に設定
roller.setOutput(1);
isCommandReceived = true;
commandReceivedTime = millis();
currentState = STATE_TRANSITIONING_TO_NEXT_SPEED;
// LED表示を更新
updateLeds(received_rpm, received_sec);
}
// — cmdが”POS”の場合 —
else if (cmd == “POS”) {
// **修正: 初期位置からの差分を計算して、相対的な位置を取得**
int32_t current_position = roller.getPosReadback() – initialPosition;
// 応答用のJSONドキュメントを作成
StaticJsonDocument<64> posResponseDoc;
posResponseDoc[“seq”] = doc.containsKey(“seq”) ? doc[“seq”].as<int>() : 0;
posResponseDoc[“POSITION”] = current_position;
String posResponse;
serializeJson(posResponseDoc, posResponse);
// “motor/response”に即座に送信
mqttClient.publish(mqtt_topic_pub, posResponse.c_str());
// **モーターの状態やプログラムの状態は変更しない**
// **既存の動作を維持し、次の受信を待つ**
}
// — それ以外のcmdの場合 —
else {
// 無効なコマンドのためエラー応答を返す
StaticJsonDocument<64> errorDoc;
errorDoc[“command”] = “cmd ERROR”;
String errorResponse;
serializeJson(errorDoc, errorResponse);
mqttClient.publish(mqtt_topic_pub, errorResponse.c_str());
// **モーターの状態やプログラムの状態は変更しない**
}
} else {
// JSON解析失敗時、または”cmd”キーがない場合
// エラー応答を返す
StaticJsonDocument<64> errorDoc;
errorDoc[“command”] = “cmd ERROR”;
String errorResponse;
serializeJson(errorDoc, errorResponse);
mqttClient.publish(mqtt_topic_pub, errorResponse.c_str());
// **モーターの状態やプログラムの状態は変更しない**
}
}
// MQTTブローカーに接続する関数
void connectToMqtt() {
M5.dis.fillpix(LED_COLOR_MQTT_CONNECTING);
while (!mqttClient.connected()) {
String clientId = “M5AtomMatrix-“;
clientId += String(random(0xffff), HEX);
if (mqttClient.connect(clientId.c_str())) {
mqttClient.subscribe(mqtt_topic_sub);
M5.dis.fillpix(LED_COLOR_IDLE);
} else {
M5.dis.fillpix(LED_COLOR_ERROR);
delay(5000);
M5.dis.fillpix(LED_COLOR_MQTT_CONNECTING);
}
}
}
void setup() {
// M5Atomの初期化
M5.begin(true, false, true);
initRoller(); // Unit Rollerモジュールを初期化
// **修正: プログラム起動時にエンコーダの初期値を記録**
initialPosition = roller.getPosReadback();
// Wi-FiとOTAを初期化
if (!WiFi.config(ip, gateway, subnet, dns1)) {
}
WiFi.mode(WIFI_STA);
WiFi.begin(ssid, password);
connectAnimation();
ArduinoOTA.setHostname(host_name);
// OTAイベントハンドラの設定
ArduinoOTA.onStart([]() {
M5.dis.fillpix(0xFFFFFF);
});
ArduinoOTA.onEnd([]() {
M5.dis.fillpix(0x00FF00);
delay(3000);
ESP.restart();
});
ArduinoOTA.onProgress([](unsigned int progress, unsigned int total) {
int leds_to_light = (progress / (total / 25));
for (int i = 0; i < 25; i++) {
M5.dis.drawpix(i, (i < leds_to_light) ? 0x0000FF : 0x000000);
}
});
ArduinoOTA.onError([](ota_error_t error) {
M5.dis.fillpix(0xFF0000);
delay(100);
M5.dis.fillpix(0x000000);
delay(100);
M5.dis.fillpix(0xFF0000);
});
ArduinoOTA.begin();
// MQTTクライアントの設定
mqttClient.setServer(mqtt_broker, mqtt_port);
mqttClient.setCallback(onMqttMessage);
// MQTT接続の開始
connectToMqtt();
M5.dis.fillpix(LED_COLOR_IDLE);
}
void loop() {
M5.update();
ArduinoOTA.handle();
if (!mqttClient.connected()) {
connectToMqtt();
}
mqttClient.loop();
switch (currentState) {
case STATE_WAITING_FOR_COMMAND:
// モーターの状態は変更しない
break;
case STATE_TRANSITIONING_TO_NEXT_SPEED:
// 目標速度への遷移が完了したら状態を更新
if (updateSpeedTransition(received_rpm)) {
// 遷移が完了したら、STATE_RUNNING_AT_TARGET_SPEEDへ移行
currentState = STATE_RUNNING_AT_TARGET_SPEED;
}
break;
case STATE_RUNNING_AT_TARGET_SPEED:
// 受信したsec秒が経過したら
if (millis() – commandReceivedTime >= (unsigned long)received_sec * 1000) {
if (isCommandReceived) {
// JSONドキュメントをシリアライズしてペイロードを作成
String jsonString;
serializeJson(doc, jsonString);
// publish
mqttClient.publish(mqtt_topic_pub, jsonString.c_str());
isCommandReceived = false;
// **変更: 状態を STATE_WAITING_FOR_COMMAND に戻さない**
}
} else {
// 残り時間を計算し、LEDの点灯数を更新
unsigned long elapsedTime = millis() – commandReceivedTime;
unsigned long total_duration_ms = (unsigned long)received_sec * 1000;
int leds_to_light = (int)((total_duration_ms – elapsedTime) / 1000);
updateLeds(received_rpm, leds_to_light);
}
break;
}
delay(delay_ms);
}
MQTT_Matrix_pub_commans_NEW.py
# プログラム名: MQTT_Matrix_pub_commans_NEW:2025-09-17
# 機能概略:
# 定義されたモーターコマンドのシーケンスを順番にMQTTで送信します。
# 各コマンドは、"cmd"(コマンド名)、"rpm"(回転数)、"sec"(秒数)の3つの要素から構成されます。
# Atom Matrixからの応答を受信するたびに次のコマンドを送信し、すべてのコマンドを送信したら終了します。
# 送信メッセージはシーケンス番号(seq)を含み、ターミナルに送受信メッセージを表示します。
import paho.mqtt.client as mqtt
import json
import time
# 送信するコマンドのリスト (cmd, rpm, sec)
# コマンドはタプル形式で定義され、最初の要素がコマンド文字列、2番目がRPM、3番目が秒数です。
commans = (("SPIN", 60, 5), ("SPIN", 30, 5), ("POS", 0, 5), ("SPIN", -30, 5), ("SPIN", 0, 2))
# commans = (("SPIN", 60, 5), ("SPIN", -60, 5), ("SPIN", 60, 5), ("SPIN", 30, 5), ("SPIN", -30, 5), ("SPIN", 0, 1))
# commans = (("SPIN", 150, 10), ("SPIN", -150, 10), ("SPIN", 150, 10), ("SPIN", -150, 10), ("SPIN", 150, 10), ("SPIN", -150, 10), ("SPIN", 0, 1))
commans = (("SPIN", 100, 5), ("POS", 30, 5), ("SPIN", 0, 5))
commans = (("SPIN", 100, 5), ("SPIN", -150, 5), ("SPIN", 100, 5), ("SPIN", 0, 5), ("SPIN", 100, 5), ("SPIN", -150, 5), ("SPIN", 100, 5), ("SPIN", 0, 5))
# 現在のコマンドインデックス
command_index = 0
# ====== 設定変数 ======
# MQTTブローカーのホストとポート
BROKER_HOST = "192.168.0.13"
BROKER_PORT = 1883
# 送信トピックと受信トピック
TOPIC_COMMAND = "motor/command"
TOPIC_RESPONSE = "motor/response"
# 通信の制御フラグ
# False: 次のメッセージは送信しない
# True: 次のメッセージを送信可能
next_message_ready = True
# メッセージのシーケンス番号
message_sequence = 0
# ====== コールバック関数 ======
def on_connect(client, userdata, flags, rc, properties):
"""ブローカーに接続したときのコールバック関数"""
print(f"Connected to MQTT Broker with result code {rc}")
# 応答を受信するためにトピックを購読する
client.subscribe(TOPIC_RESPONSE)
print(f"Subscribed to topic: {TOPIC_RESPONSE}")
def on_message(client, userdata, msg):
"""メッセージを受信したときのコールバック関数"""
global next_message_ready
print("\n--- Received message ---")
print(f"Topic: {msg.topic}")
try:
# ペイロードを文字列にデコードし、JSONとして解析する
payload_str = msg.payload.decode("utf-8")
payload_json = json.loads(payload_str)
print(f"Payload: {payload_json}")
except json.JSONDecodeError:
print(f"Payload (non-JSON): {payload_str}")
print("----------------------")
# 次のメッセージ送信を許可する
next_message_ready = True
def send_message(client):
"""
メッセージを送信する関数。
commansリストから現在のcmd, rpm, secの値を取得し、MQTTメッセージとして送信します。
"""
global message_sequence
global next_message_ready
global command_index
# 現在のコマンドを取得
cmd_value = commans[command_index][0]
rpm_value = commans[command_index][1]
sec_value = commans[command_index][2]
# シーケンス番号をインクリメント
message_sequence += 1
# 送信するペイロードをJSON形式で作成
payload = {
"seq": message_sequence,
"cmd": cmd_value,
"rpm": rpm_value,
"sec": sec_value
}
# ペイロードをJSON文字列に変換
payload_str = json.dumps(payload)
# MQTTメッセージを送信
client.publish(TOPIC_COMMAND, payload_str)
print("--- Sent message ---")
print(f"Topic: {TOPIC_COMMAND}")
print(f"Payload: {payload_str}")
print("--------------------")
# 次の応答を待つため、送信を一時的に停止
next_message_ready = False
# 次回送信のためにインデックスを更新
command_index += 1
# ====== メイン処理 ======
if __name__ == "__main__":
# MQTTクライアントのインスタンスを作成
# 最新のAPIバージョンを指定して警告を解消
client = mqtt.Client(mqtt.CallbackAPIVersion.VERSION2)
# コールバック関数を登録
client.on_connect = on_connect
client.on_message = on_message
# ブローカーに接続
try:
client.connect(BROKER_HOST, BROKER_PORT, 60)
print("Connecting to broker...")
except Exception as e:
print(f"Connection failed: {e}")
exit()
# バックグラウンドでネットワーク通信を開始
client.loop_start()
# 起動後3秒待ってから最初のメッセージを送信
print("Waiting 3 seconds before first publish...")
time.sleep(1)
try:
# メッセージの送受信ループ
# すべてのコマンドを送信するまでループを続ける
while command_index < len(commans):
# 応答が来るまで待機
while not next_message_ready:
time.sleep(0.1)
# 次のメッセージを送信
send_message(client)
# すべてのコマンドを送信した後、最後の応答を待つ
while not next_message_ready:
time.sleep(0.1)
print("\nAll commands sent. Exiting script.")
except KeyboardInterrupt:
print("\nExiting script.")
finally:
# クライアントを停止
client.loop_stop()
client.disconnect()
関連情報
※Roller485のArduinoライブラリ(i2C)のメモ
オフィシャルサイト
サンプルプログラム(このまま動かさない。コードを参照する)