上の画像の「micro_ROS_joy2cmd_vel.py」を作る。
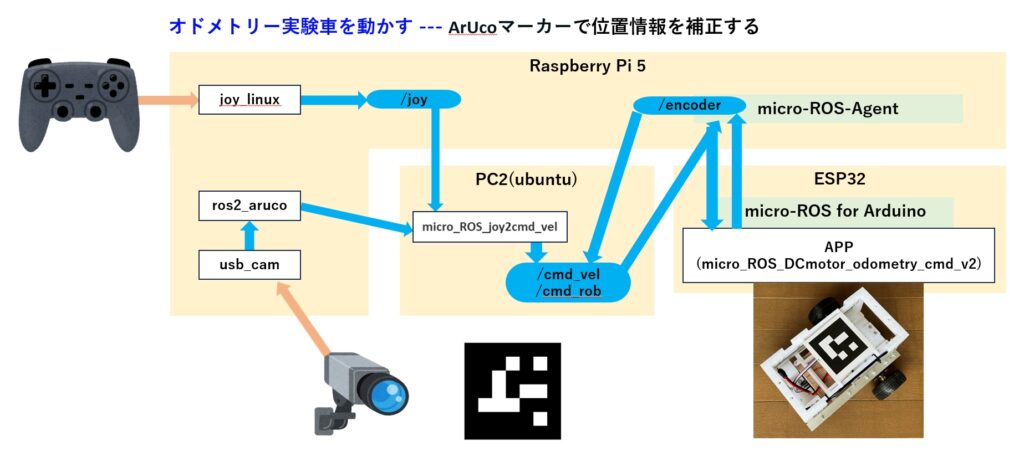
トピック
| トピック名 | メッセージ型 | 通信方向 | 使用ノード | 説明 |
| /joy | Joy | Subscribe | joy_linux(pub) | |
| /encoder | String | Subscribe | ||
| /aruco_markers | ArucoMarkers | Subscribe | ||
| /waypoints’/waypoints | String | Subscribe | ||
| /cmd_vel | Twist | Publish | ||
| /cmd_rob | String | Publish |
コントローラーのボタン操作
| 十字ボタン | 上下→前進/行進 左右→左右の回転 | 停止状態からは、6回押して動き出す。 |
| 〇ボタン | 停止 | 停止と同時に巡回も打ち切る。 |
| ✕ボタン | 現在地の座標設定 x:0,y:0,theta:0 | |
| △ボタン | 座標x:0,y:0に移動し、 マーカーの座標で更新する | マーカーを監視するカメラが動作していること。 |
| 🔲ボタン | 巡回パターン3 | |
| L1ボタン | 巡回パターン1 | |
| R1ボタン | 巡回パターン2 | |
| OPTIONボタン | トピックで指定した巡回パターン | 下の「トピック/waypointsを使った巡回パターンの使い方」参照。 |