以下の記載は保留する。よくわかるサイトがあるのでそれを参照する。
●ROS2ドキュメント:Jazzyのチュートリアル 初心者: CLI ツール
●ロボット制御 #12 ROS2を使ってみる(RasPi5編)
関連して入手できた情報があれば追加する。
●亀を表示する
ros2 run turtlesim turtlesim_node
●亀を動かす
別のターミナルを起動し、キーボード操作で動かす。ROS_DOMAIN_IDが設定されていれば、他のPCでもよい。
ros2 run turtlesim turtle_teleop_key
ros2 run teleop_twist_keyboard teleop_twist_keyboard --ros-args -r /cmd_vel:=/turtle1/cmd_vel●亀のトピックを表示する
3つ目のターミナルを起動し、トピック一覧を表示する。
ros2 topic list -t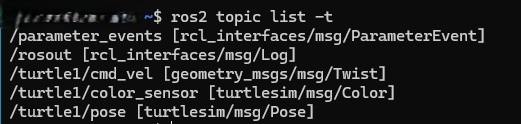
●トピックの内容を表示する
ros2 topic echo /turtle1/poseトピックを送って亀を動かす
●亀を動かすトピックを確認する。
上のros2 topic list -tコマンドでトピックcmd_velのメッセージタイプが分かったので、このタイプの詳細を得る。
ros2 interface show geometry_msgs/msg/Twist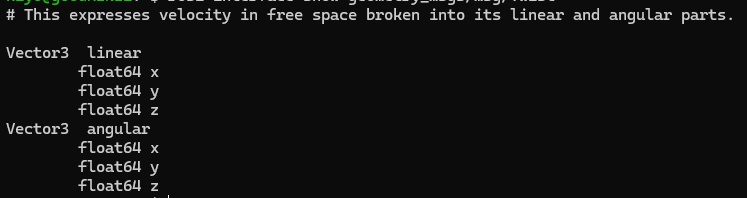
●rqtから亀を動かす
rqtのメニューPlugins > Topics > Publisherの順に選ぶ。
Topicのプルダウンから/turtle1/cmd_velを選ぶ。
Topicの横のチェックを入れるとトピックが出力される。
の使用例はここに
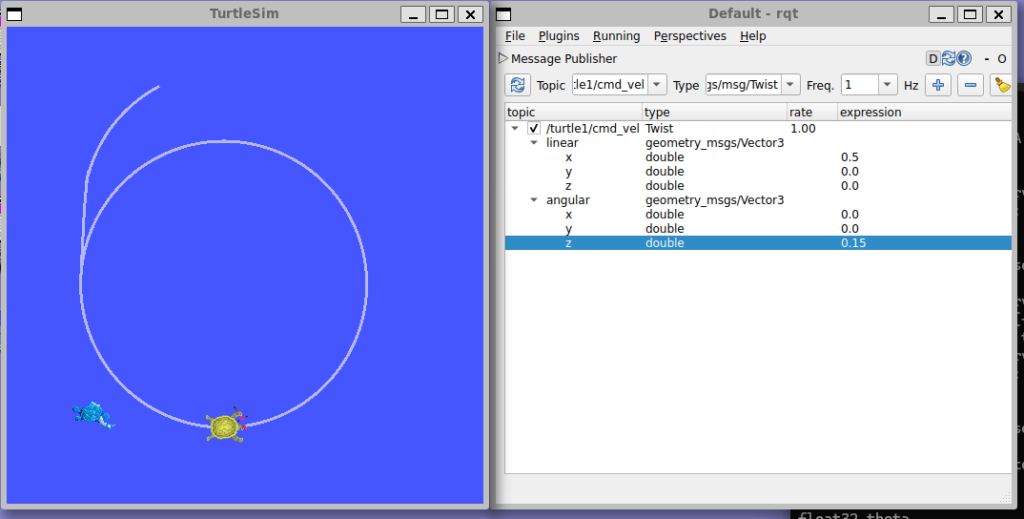
●コマンドを使って亀を動かす
亀が円を描いて移動する。
ros2 topic pub --rate 1 /turtle1/cmd_vel geometry_msgs/msg/Twist "{linear: {x: 0.5, y: 0.0, z: 0.0}, angular: {x: 0.0, y: 0.0, z: 0.3}}"ros2 service call /spawn turtlesim/srv/Spawn "{x: 4.0, y: 4.0, theta: 0.0, name: 'turtle2'}"ros2 run turtlesim turtle_teleop_key --ros-args --remap turtle1/cmd_vel:=turtle2/cmd_vel