外観
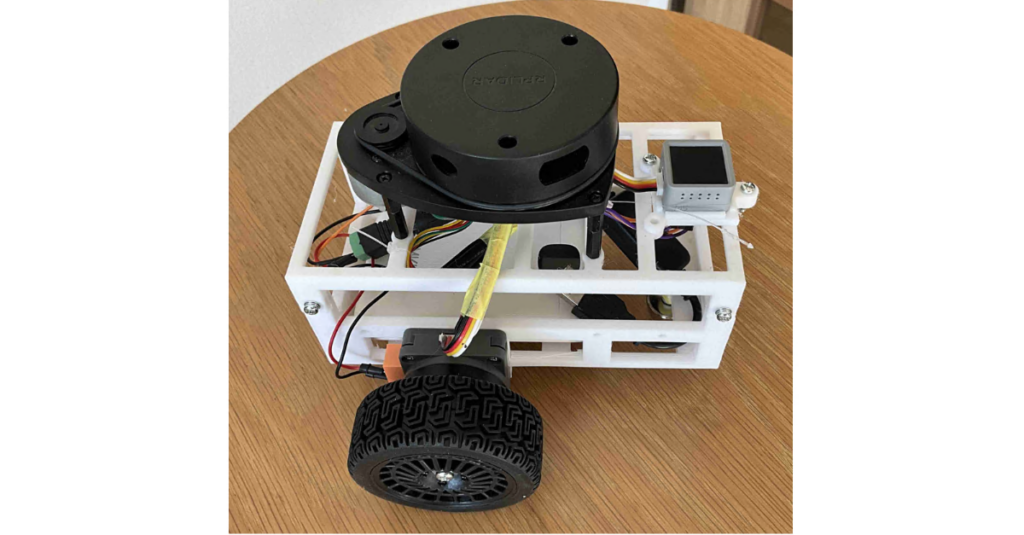
ロボットカーの構成部品

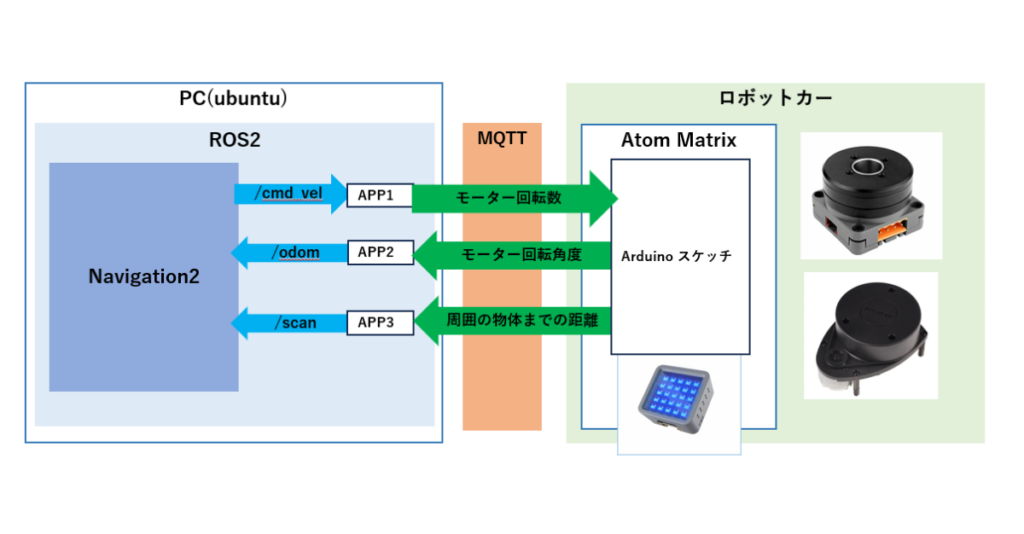
システム構成仕様書
============================================================
自作ロボット「My_Navi」システム構成仕様書 (v1.1)
============================================================
作成日: 2025年12月14日
概要: M5Atom Matrix, UnitRoller, RPLidarを使用した差動二輪駆動ロボットの自律移動システム
------------------------------------------------------------
【1. ハードウェア仕様 (URDFより算出)】
| 項目 | 値 | 備考 |
| :--- | :--- | :--- |
| 駆動方式 | 差動二輪駆動 | 前輪駆動または後輪駆動 |
| タイヤ径 | 0.07 m (70mm) | 半径 0.035m |
| トレッド幅 | 0.1635 m (163.5mm) | 左右タイヤ中心間の距離 |
| 機体サイズ | 160 x 185 x 140 mm | (長さ x 幅 x 高さ) |
| LiDAR位置 | X: -0.025m, Z: 0.130m | ロボット中心より2.5cm後方、高さ13cm |
| MCU | M5Atom Matrix | ESP32-PICO-D4 |
| 通信 | Wi-Fi (MQTT) | Broker: 192.168.0.110 |
------------------------------------------------------------
【2. ソフトウェア構成一覧】
PC側(ROS 2)とロボット側(ESP32)が MQTTブローカーを介して連携する分散構成。
A. ロボット側 (Firmware)
- ファイル名: My_Navi_Lidar_Rev.ino
- 役割: ロボット制御ファームウェア
[Core 0] LiDARデータ収集・解析(180度回転補正済み)
[Core 1] MQTT通信、モーター制御、オドメトリ送信
- 安全機能: LEDステータス表示、通信切断時の再接続
B. PC側 (ROS 2 Control & Nodes)
- My_Navi.py (Manual):
ジョイスティック手動操縦。Joy入力をMQTT(RPM)に変換。
※右モーター指令の符号反転処理を含む。
- mqtt_to_odom.py (Bridge):
足回り情報のROS化。MQTT(Pos) -> ROS(/odom)。
- mqtt_to_scan.py (Bridge):
LiDAR情報のROS化。MQTT(Scan) -> ROS(/scan)。
- cmd_vel_to_mqtt.py (Bridge):
Nav2指令のMQTT化。ROS(/cmd_vel) -> MQTT(RPM)。
- my_navigation_launch.py (Launch):
ナビゲーション起動。既存の地図を読み込み自律移動を行う。
- my_slam_launch.py (Launch):
地図作成(SLAM)起動。未知の環境を探索して地図を作成する。
C. 設定・定義ファイル
- my_robot.urdf.xacro (Model): ロボット形状定義
- nav2_params.yaml (Config): Nav2パラメータ
- mapper_params_...yaml (Config): SLAM Toolboxパラメータ
------------------------------------------------------------
【3. 重要ロジック・特記事項(注意点)】
1. モーター回転方向の「二重反転」処理
- PC側(Python): 右モーター指令値を「-1倍」して送信。
- マイコン側(Arduino): 受信した左右両方の指令値を「-1倍」して出力。
- 結果: 右モーターは正転、左モーターは逆転(配線都合による補正)。
2. LiDARの取り付け向き補正
- 物理的に180度反転(後ろ向き)に取り付け。
- マイコン側で `angle += 180.0` の補正済み。
- ROS側(URDF)では回転させないこと。
3. ESP32 マルチコア並列処理
- Core 0: LiDAR処理 / Core 1: 通信・制御
- 排他制御(bufferMutex)によりデータ破損を防止。
============================================================ハードウェア仕様 (URDF定義)
| 項目 | 値 | 備考 |
| 駆動方式 | 差動二輪駆動 (Differential Drive) | 前輪駆動または後輪駆動 |
| タイヤ径 | 0.07 m (70mm) | 半径 0.035m |
| トレッド幅 | 0.1635 m (163.5mm) | 左右タイヤ中心間の距離 |
| 機体サイズ | 160 x 185 x 140 mm | (長さ x 幅 x 高さ) |
| LiDAR位置 | X: -0.025m, Z: 0.130m | ロボット中心より2.5cm後方、高さ13cm |
| MCU | M5Atom Matrix | ESP32-PICO-D4 |
| 通信 | Wi-Fi (MQTT) | Broker: 192.168.0.110 |
ディレクトリ構成
~/My_Navi_ws/src/My_Navi_basic/
│
├── setup.py
│
├── My_Navi_basic/
│ ├── My_Navi.py <-- 【追加】ジョイスティック操作スクリプト
│ ├── cmd_vel_to_mqtt_node.py
│ ├── mqtt_to_odom_node.py
│ └── mqtt_to_scan_node.py
│
├── config/
│ ├── ekf.yaml
│ ├── mapper_params_online_async.yaml
│ └── nav2_params.yaml
│
├── launch/
│ ├── my_navigation_launch.py
│ ├── my_slam_launch.py
│ └── start_joystick.sh <-- 【追加】起動用シェルスクリプト
│
└── urdf/
└── my_robot.urdf.xacroソフトウェア構成一覧
A. ロボット側 (Firmware)
| ファイル名 | 分類 | 役割・概要 | 依存ライブラリ | MQTTインターフェース (Topic) |
My_Navi_Lidar_Rev.ino | Main | ロボット制御ファームウェア – Core 0: LiDARデータ収集・解析(180度回転補正済み) – Core 1: MQTT通信、モーター制御、オドメトリ送信 – 安全機能: LEDステータス表示、通信切断時の再接続 | M5AtomWiFiPubSubClientArduinoJsonunit_rolleri2c | [Pub] (送信) – Roller485/position(エンコーダ・IMU) – Lidar/data(点群データ) [Sub] (受信) – Roller485/twin_rpm(モーター回転数指令) |
B. PC側 (ROS 2 Control & Nodes)
| ファイル名 | 分類 | 役割・概要 |
My_Navi.py | Manual | ジョイスティック手動操縦 – Joy入力をMQTT(RPM)に変換して送信 – 簡易オドメトリ計算と表示 – 重要: 右モーター指令の符号反転処理を含む |
mqtt_to_odom.py | Bridge | 足回り情報のROS化 – MQTT ( Roller485/position) → ROS 2 (/odom)– エンコーダ値から座標計算を行う |
mqtt_to_scan.py | Bridge | LiDAR情報のROS化 – MQTT ( Roller485/scan) → ROS 2 (/scan)– バイナリデータをLaserScan型に変換 |
cmd_vel_to_mqtt.py | Bridge | Nav2指令のMQTT化 – ROS 2 ( /cmd_vel) → MQTT (Roller485/twin_rpm)– 速度(m/s)を回転数(RPM)に変換 |
my_navigation_launch.py | Launch | ナビゲーション起動 – 既存の地図を読み込み、自律移動を行うモード – map_name 引数で地図切替が可能 |
my_slam_launch.py | Launch | 地図作成 (SLAM) 起動 – 地図がない状態で走り、地図を作るモード – SLAM Toolboxを起動し、作成された地図を保存可能にする |
C. 設定・定義ファイル
| ファイル名 | 分類 | 役割・概要 | 現在の主な設定・変更点 |
my_robot.urdf.xacro | Model | ロボット形状定義 ロボットの物理的な構造と座標変換(TF)のベースとなる定義ファイル。 | ・タイヤのトレッド幅、ホイール径の定義 ・LiDAR ( laser_link) や IMU の取り付け位置(base_link からの相対座標)・衝突モデル(Collision)と慣性行列(Inertia) |
nav2_params.yaml | Config | Nav2パラメータ 自律移動(Navigation2)の挙動を決定する設定ファイル。 | ・CPU負荷対策: コストマップの更新・配信頻度を下げ、TF遅延エラーを防止 ・MPPI制御: 狭い場所を通れるようインフレーション半径を縮小 (Global: 0.35m) ・通信設定: LiDARデータロストを防ぐためQoSを Reliable に変更・移動特性: 加減速をマイルドにしつつ、最高速度を 0.2m/s に制限 |
mapper_params_online_async.yaml | Config | SLAM Toolboxパラメータ 地図作成(SLAM)のアルゴリズム設定ファイル。 | ・安定化: Wi-Fi/MQTT通信のジッター(揺らぎ)を許容するため transform_timeout を 0.5s に延長・ノイズ対策: LiDAR至近距離 (0.2m以下) の不要な点群をカット ・精度: わずかな移動や回転でも地図を更新するよう感度を高めに設定 |
ekf.yaml | Config | センサーフュージョン設定 ( robot_localization)エンコーダとIMUを統合し、正確な自己位置(Odom)を推定する。 | ・オドメトリ信頼: エンコーダの値を絶対的に信頼する設定 (odom0_differential: false)・IMU活用: 回転時の補正に角速度データを使用 ・2Dモード: two_d_mode: true で高さを無視し、平面移動に特化 |
●接続
ピン コード色 Atomt PIN 説明
TX 黄 19 緑 ---------- 橙(黒)
RX 緑 22 黄 ---------- 紫(黒)
VCC 橙 5V 黒 ---|------ 橙
GND 白 GND 赤 ---|--|--- 黄
GND MOTO 黒 GND 黄 ---|--|
CTRL MOTO 紫 23 黒 ---|------ 紫
5V MOTO 赤 5V 赤 ---|
RPLidar A1 信号 Atom Matrixピン 備考
5V/VCC 5V モーター電源用。USB給電または外部5Vから供給。
GND GND グランド共通化。
TX G33 Atom側は RX (Serial1) として使用。
RX G23 Atom側は TX (Serial1) として使用。
MOTOCTL G22 モーター回転制御用 (Highで回転)。
重要なロジック・特記事項(注意点)
============================================================
My_Navi システム重要ロジック・特記事項 (Technical Notes)
============================================================
作成日: 2025年12月14日
対象システム: My_Navi (M5Atom + UnitRoller + RPLidar)
開発やメンテナンスを行う際、以下の3点はシステムの根幹に関わる「特殊な仕様」であるため、
変更する際は十分に注意すること。
------------------------------------------------------------
【1. モーター回転方向の「二重反転」処理】
ハードウェアの配線特性とソフトウェアの整合性を取るため、
PC側とマイコン側の2箇所で符号の反転処理が行われている。
A. PC側 (My_Navi.py)
- 右モーターの指令値(Rrpm)のみ、符号を「-1倍」してMQTT送信している。
- 理由: ジョイスティックの入力と実際のロボットの旋回方向を合わせるため。
B. マイコン側 (My_Navi_Lidar_Rev.ino)
- 受信した左右両方のRPM指令(Lrpm, Rrpm)に対し、さらに「-1倍」してモーターへ出力している。
- 理由: ユニットの配線または取り付け向きにより、プラス指令で「後退」してしまう現象を補正するため。
[結果]
最終的にモータードライバに渡る値は以下のようになる:
・左モーター = 指令値 × (-1)
・右モーター = 指令値 × (-1) × (-1) = 指令値
※ 今後配線を変更しない限り、この二重ロジックを維持する必要がある。
------------------------------------------------------------
【2. LiDARの取り付け向き補正】
LiDAR (RPLidar) は、ロボットの進行方向に対して物理的に「180度反転(後ろ向き)」に取り付けられている。
・補正処理の場所: マイコン側 (My_Navi_Lidar_Rev.ino)
・処理内容: 生データをパースする際、角度データに `angle += 180.0` を加算している。
[注意点]
ROS 2側 (URDFやLaunch) に届くデータは既に「正面が0度」に直されている。
したがって、URDFファイルでLiDARのジョイントを回転させる必要はない。
もしURDF側でも回転させてしまうと、補正が二重になり、前後逆の地図ができてしまうため注意。
------------------------------------------------------------
【3. ESP32 マルチコア並列処理】
処理落ちによるLiDARデータの欠損や通信遅延を防ぐため、ESP32のデュアルコアを活用している。
・Core 0 (裏方タスク):
- LiDARからのシリアルデータ受信、パース処理、バッファリングを担当。
- 重たい処理だが、通信や制御を阻害しない。
・Core 1 (メインタスク / Arduino `loop()`):
- Wi-Fi/MQTT通信、モーター制御、LED制御を担当。
- Core 0が用意したバッファを読み取って送信する。
[注意点]
プログラムを改造する際は、`bufferMutex` (セマフォ) による排他制御を壊さないようにすること。
Core 0とCore 1が同時にバッファへアクセスすると、データが破損したりフリーズする原因となる。
============================================================IMUの効果
| 項目 | 以前の状態 | 現在の改善された状態 |
| 位置情報の主導権 | 不安定なIMU積分や、ただの足し算 | 「信頼できるタイヤの距離」 + 「IMUの鋭い方向検知」 のハイブリッド。 |
| 通信トラブル耐性 | パケットが詰まると急停止・パニック | パケットが詰まっても、嘘をついて(フィルタして)でも滑らかに振る舞う 強かさ。 |
| 地図との整合性 | 回転するたびに世界が歪む | 回転しても世界(地図)が固定されたまま、ロボットだけが回る。 |
パッケージをバックアップする
# ワークスペースの src ディレクトリへ移動
cd ~/My_Navi_ws/src
# フォルダごと圧縮 (ファイル名は日付入りで自動生成されます)
# 例: My_Navi_basic_backup_20251219.zip
zip -r ~/My_Navi_basic_backup_$(date +%Y%m%d).zip My_Navi_basiczipファイルをwindowsに持ってくる
コマンドプロンプトで
cd Documents
sftp kiyo@192.168.0.63
get My_Navi_basic_backup_20251219.zip # C:\Users\kiyo-\Documents
bye
このファイルをHDDにコピーする(DELL2_ubuntu_バックアップ)