2025年
-
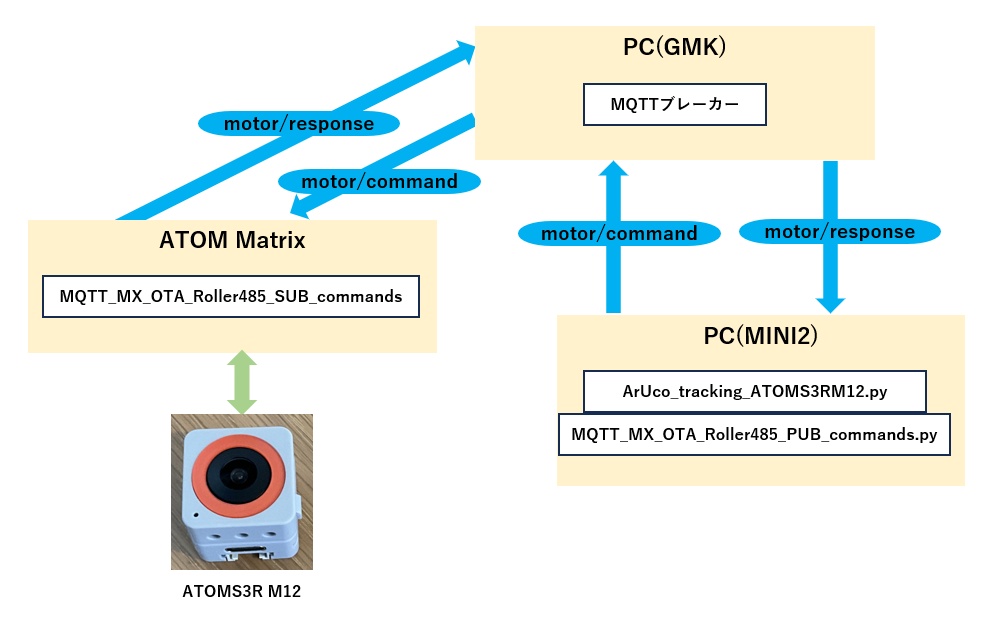
Roller485 LiteとATOMS3R M12カメラキットでArUcoマーカーをトラッキングする
概要 Roller485 LiteのPOSITIONモードは、指定した角度に俊敏に移動する。カメラでマーカーをトラッキングしたらその俊敏さが分かると思いやってみ…
-
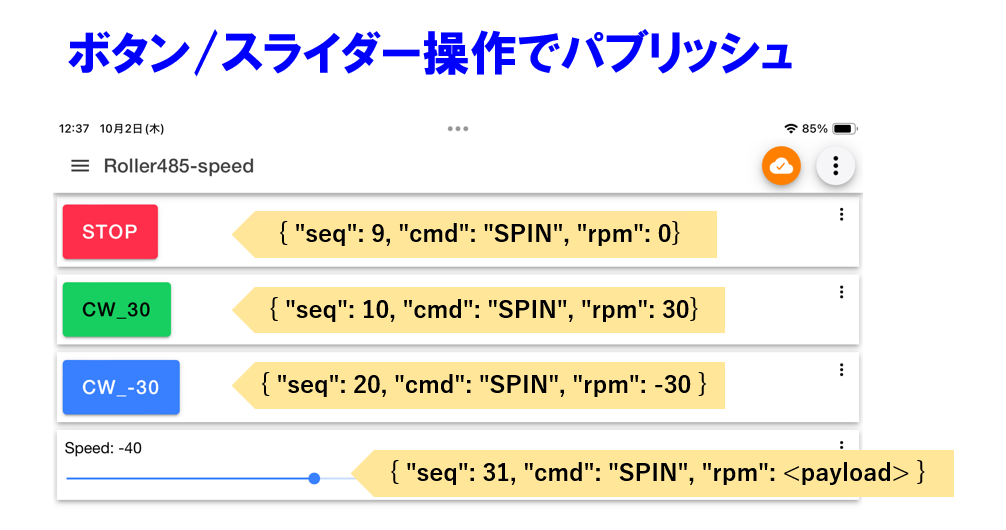
IoT MQTT Panelを使ってみる
概要 iPadやスマホで使えるMQTTアプリIoT MQTT Panelを試してみた。下の画像が使用例。STOPボタンを押すと右の黄色の帯にあるメッセージがパブ…
-

YAHOOファイナンスの個別銘柄情報の表示支援ツール
概要 東証の銘柄についてYAHOOファイナンスの個別情報の表示を簡単にするツールです。ブラウザからここにアクセスします。 使い方 表示されている銘柄のコード部分…
-
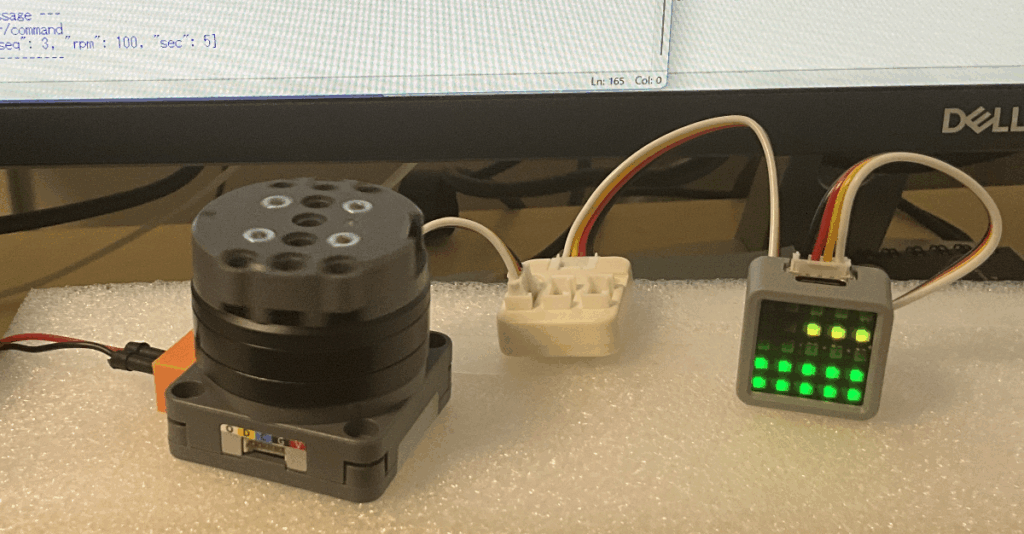
Roller485 Liteを回してみた
注意 MQTT_Matrix_pub_commans_speed.pyに変わっている 概要 統合型ブラシレス DC モーターモーションコントロールキット(R…
-
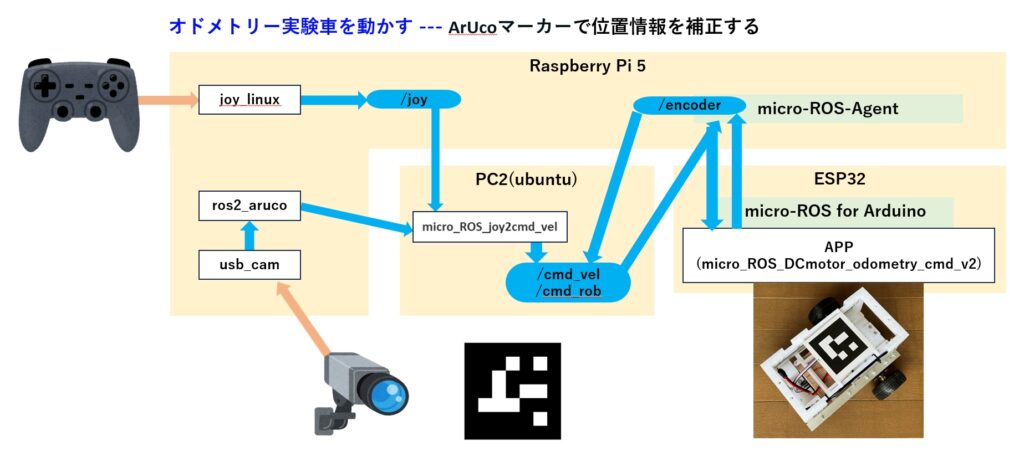
オドメトリー実験用コントローラープログラム
上の画像の「micro_ROS_joy2cmd_vel.py」を作る。 トピック トピック名 メッセージ型 通信方向 使用ノード 説明 /joy Joy Sub…
-
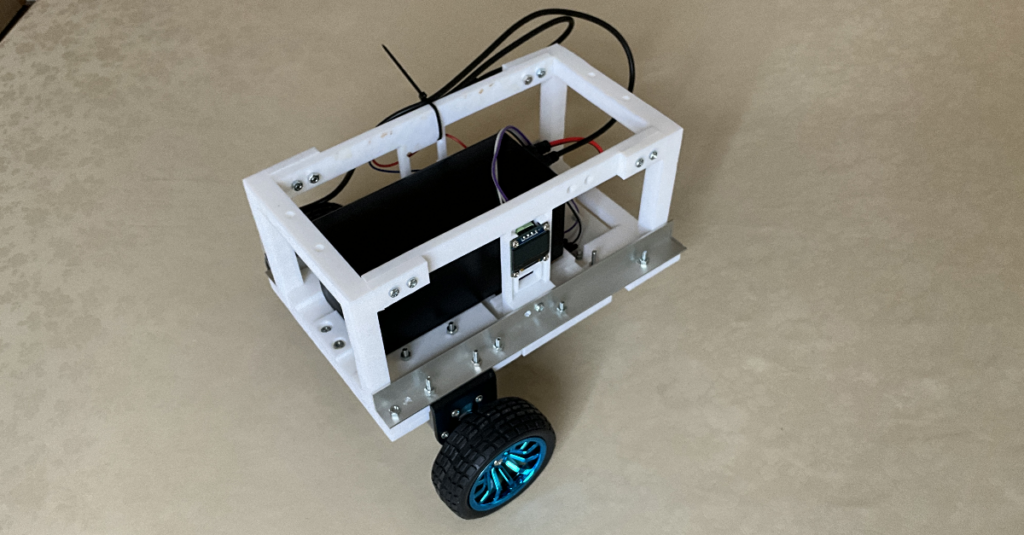
オドメトリー実験車のプログラム
WSL2で起動するジョイスティックコントロール(python) odometryをパブリッシュするコード(python) ロボット搭載ESP32のコード(Ard…
-
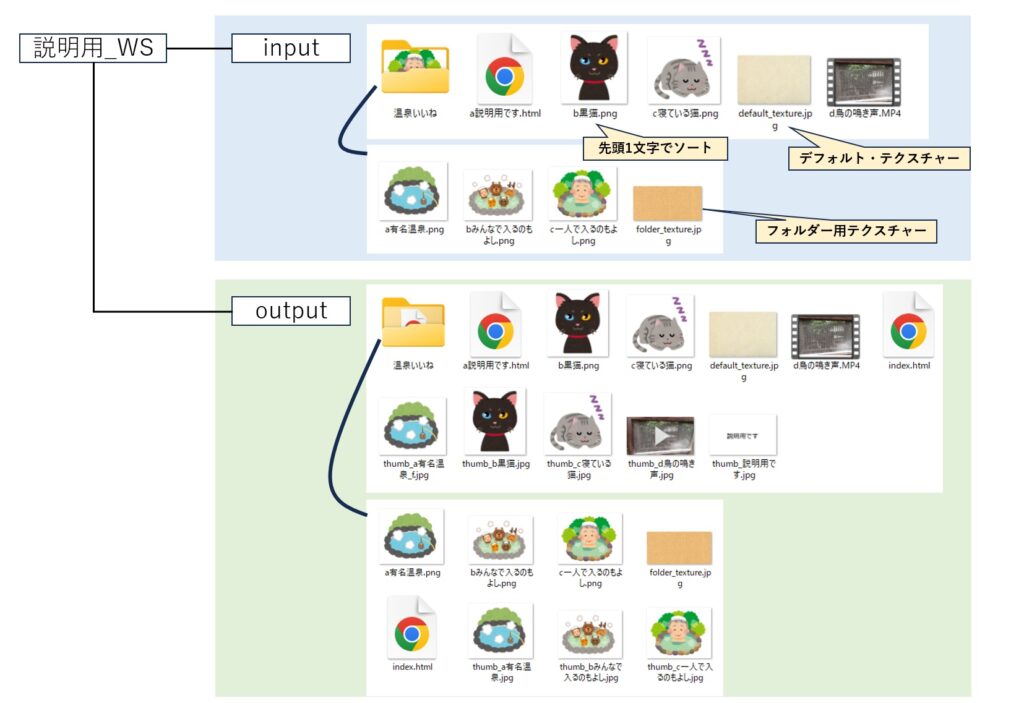
フォトアルバムツールを作ってみた
Web上にフォトアルバムを作るツールを作ってみた。多機能の既存ツールは色々あるが、途中で仕様や利用条件が変わると困る。長期に亘り変わらず使えるものが欲しかった。…
-
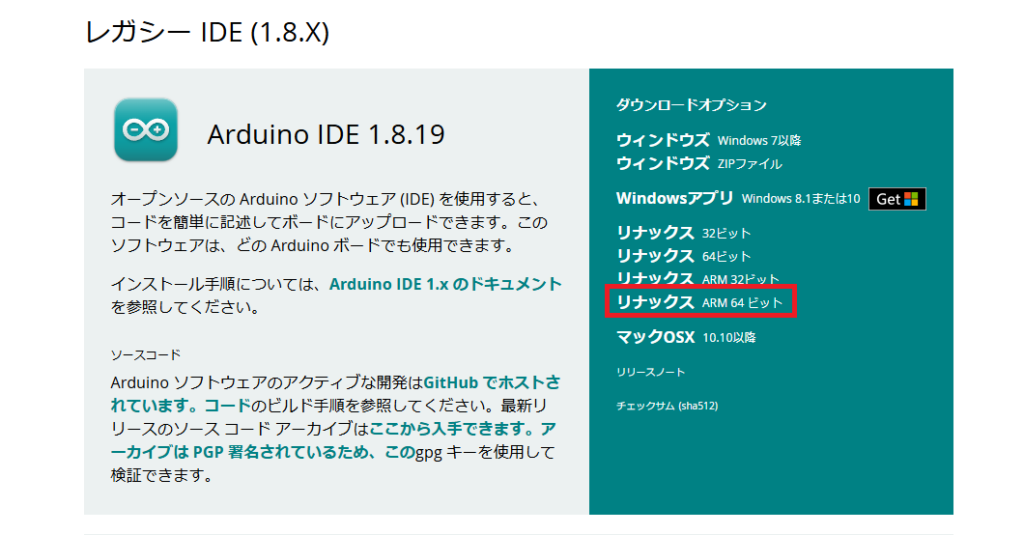
Raspberry Pi 5 に Arduino IDE をインストールする
Raspberry Pi 5 に Arduino IDE をインストールした。但し、バージョンは2.xではなく Arduino IDE 1.8.19 である。 …
-
オドメトリー実験車を調整する
オドメトリーの現在地ができるだけ実測値に近づくように調整する。 micro_ROS_joy2cmd_vel_measurement.py 前進距離を調整する R…
-
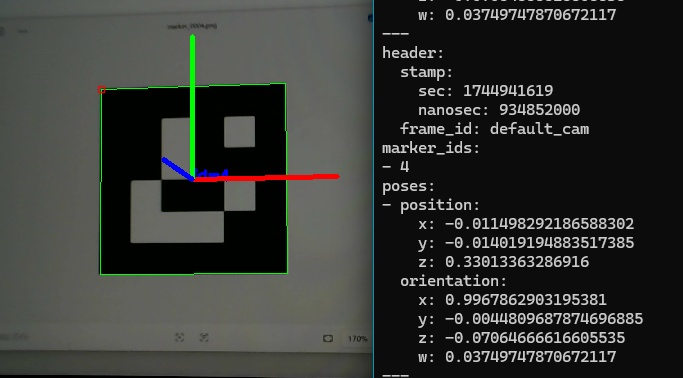
ArUcoマーカーを検出する
ArUcoマーカーの検出方法として以下の2通りを試してみた。 OpenCVのArUcoモジュールを使う。pythonのスクリプトでOpenCVのArUcoモジュ…