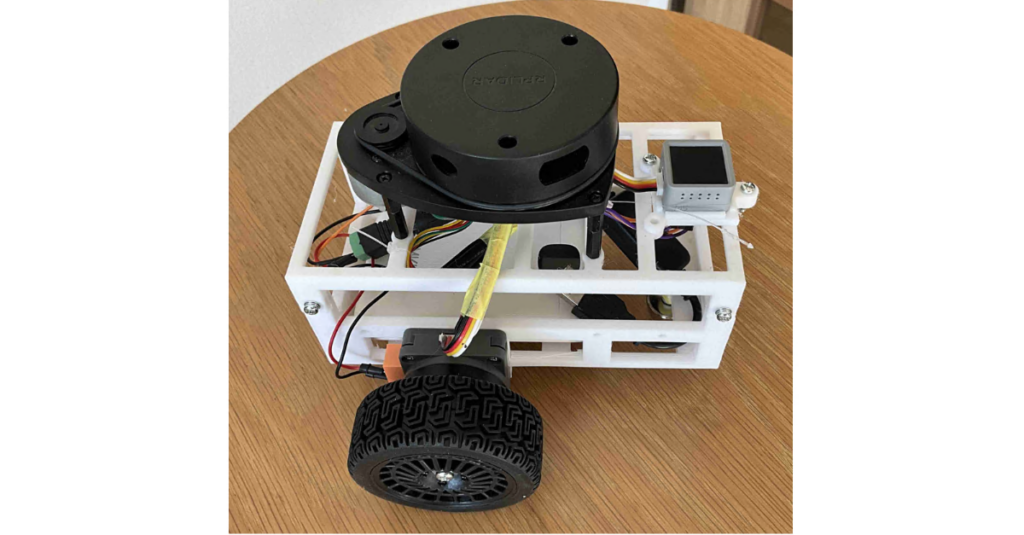
外観 ロボットカーの構成部品 システム構成仕様書 ハードウェア仕様 (URDF定義) 項目 値 備考 駆動方式 差動二輪駆動 (Differential Dri…
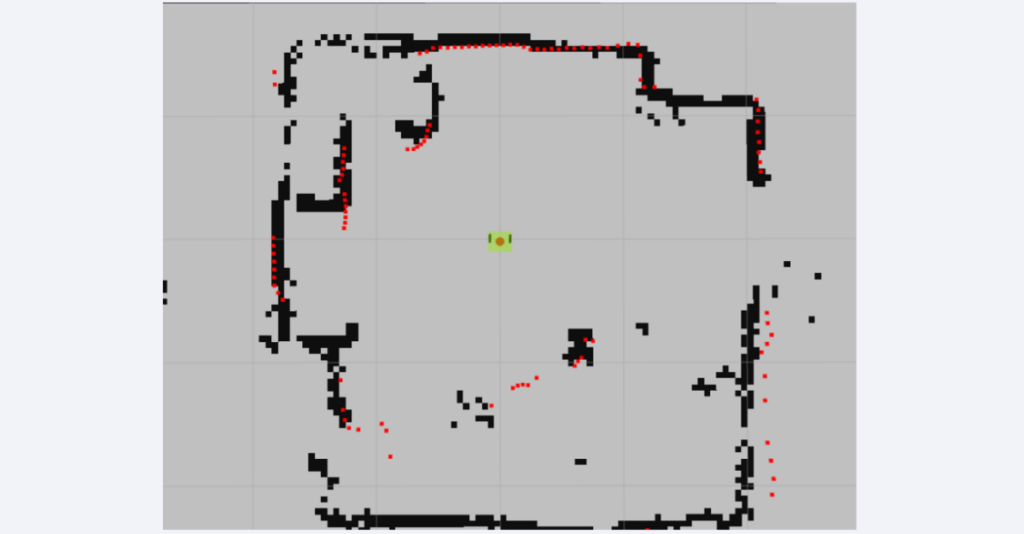
使い方 地図を作るときのロボットの動かし方 mapper_params_online_async.yamlの変更一覧 項目名 所属ノード オリジナルのデフォルト…