2025年11月
-
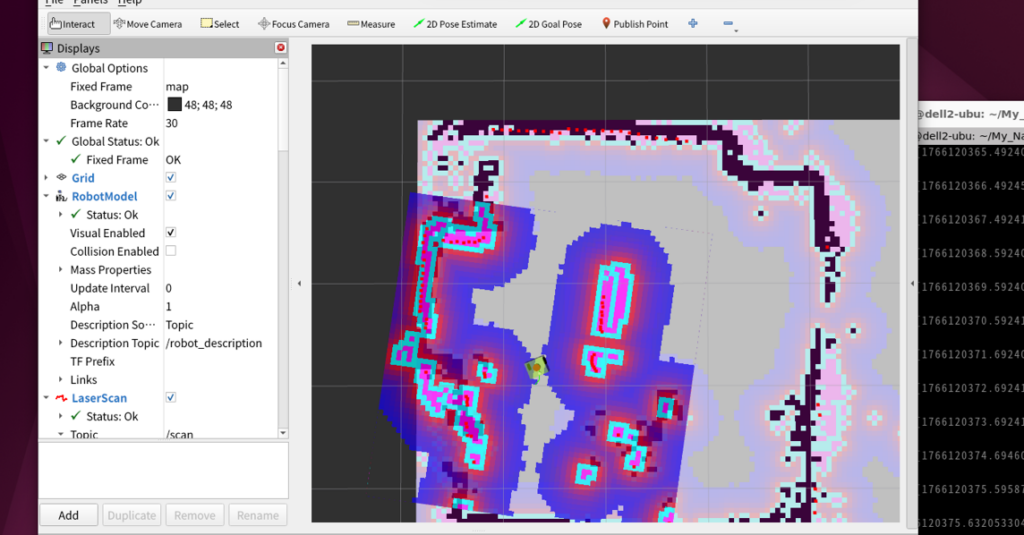
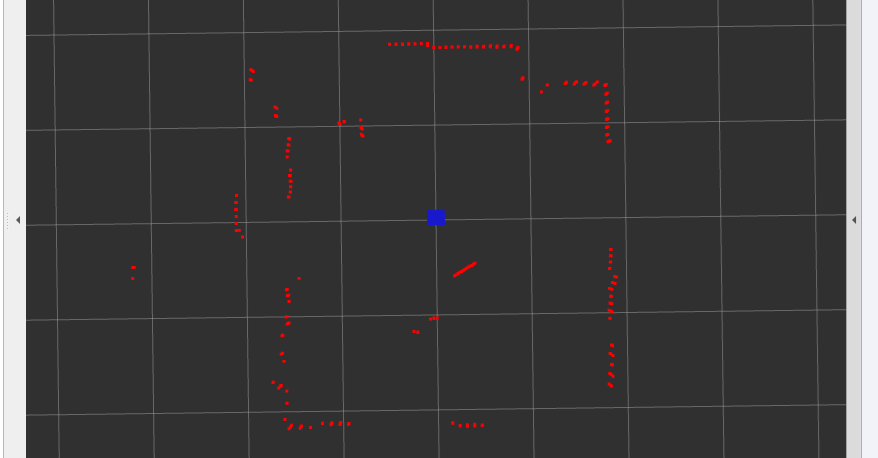
自作ロボットカーを自動走行する
迂回路探索 迂回路探索を試す場合は上の写真のように障害物を配置する。その際のマップはmy_map3を使ってローンチは以下のコマンドを使う。ros2 launch…
-
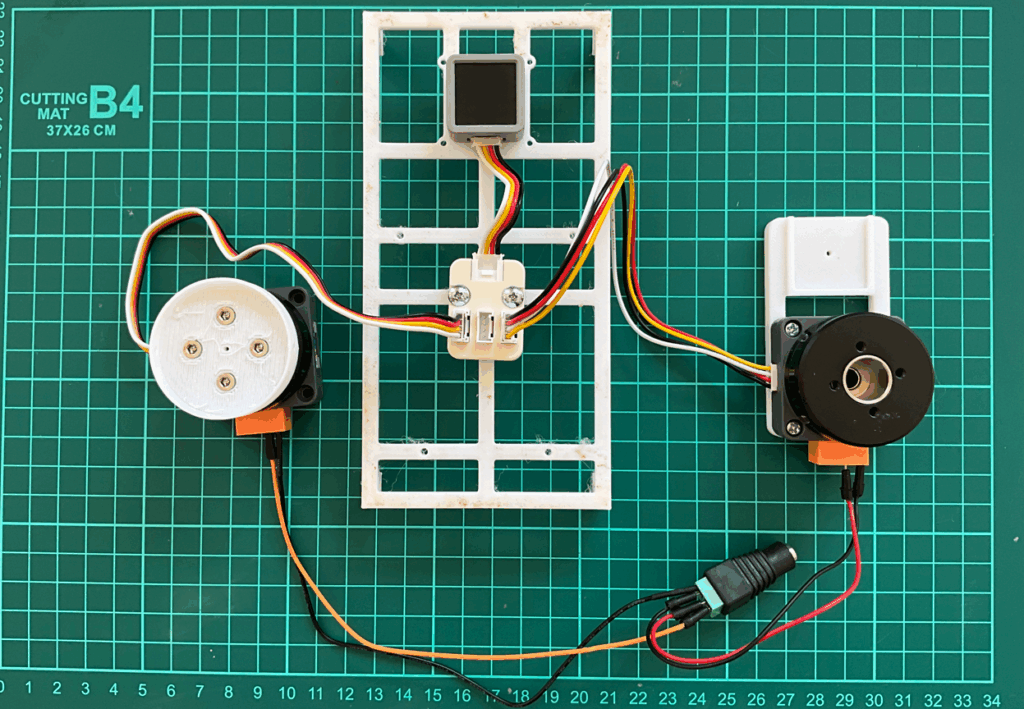
Atom MatrixにRPLidar A1 M8をつなぐ
機能 LiDAR側の線 (一般的な色) Atom Matrix ピン 備考 Logic 5V 赤 (4pin側) 5V 回路電源 Logic GND 黒 (4p…
-
Roller485 Liteでロボットカー本体を作る
この情報は途中経過で最終版ではない 概要 Roller485 Liteで差動2輪ロボットカー本体を作ってみた。Roller485 Liteを使うメリットは以下の…
-
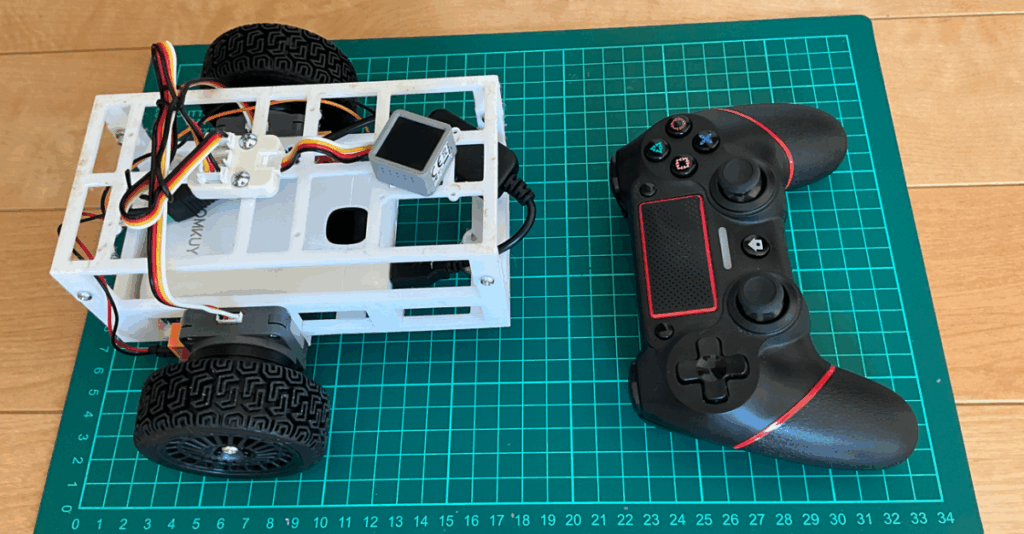
2個のRoller485 Liteを回す(2)
概要 前回に続き、Roller485 Liteを2個使いロボットカーのベースを作る。joystickコントローラでロボットカーの前後、回転の操作ができる。 使い…
-
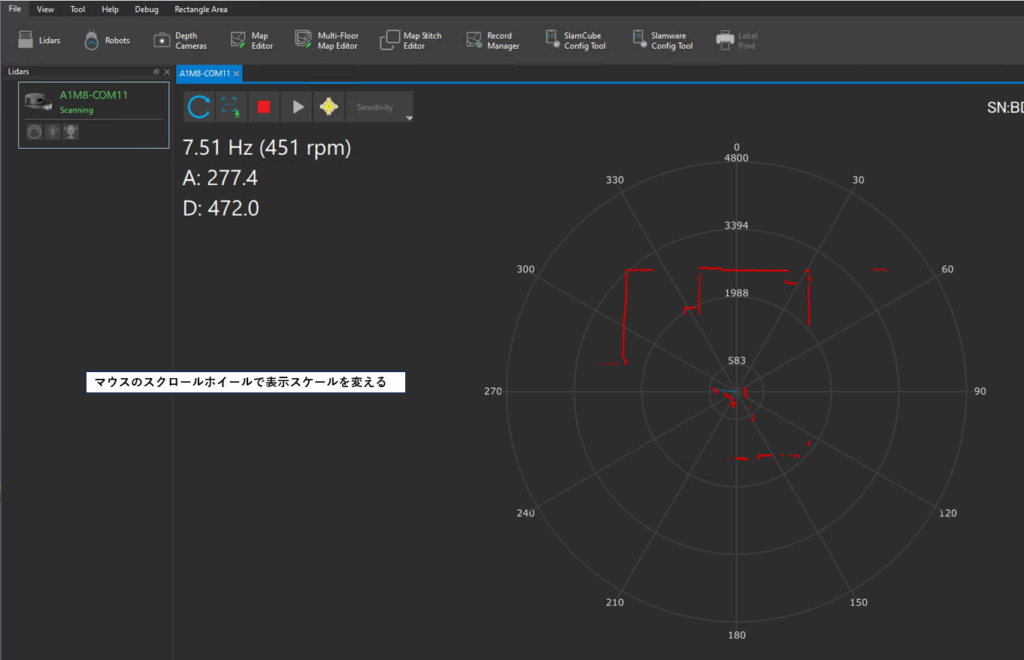
RPLidar A1 M8をWindowsで試す
概要 RPLidar A1 M8のオフィシャルサイトからWindowsのツールをダウンロードし、試してみた。 ダウンロード ここからダウンロードした。検索では分…
-
2個のRoller485 Liteを回す(1)
概要 2個のRoller485 Liteを回す最も基本の例。MQTTでコマンドをAtom Matrixに送りコントロールする。トピック “Rolle…